摘要
近年来许多新型车辆与资讯系统结合,支援各种车用服务的车载系统成为了新型车间互相较量的重点。而其中透过主动侦查的车用安全系统为一项热门的课题,该技术的逐渐发展,有助于在未来之中车辆可以在意外发生之前让驾驶者提前做出判断,大幅增加安全性,甚至更能作为自动驾驶的强力系统。
然而不论该产品功能是否强大,由单一车厂所研发的技术会因利益考量只针对自身车种设计,导致车种高价化或是无法广泛的应用于他牌车种上。因此本系统的设计,是以通用为设计理念,将主动侦查这一系统从车载系统中独立出来,使其具备跨越车种之功能。
本系统以超音波与都普勒微波雷达进行整合设计,实现一套设计容易而有效的车辆行车安全与防护系统,以突破技术上受到局限的问题。同时,系统搭配OBD-II诊断系统来与车体进行联系,除了可获得供电外,亦能获得车内的节点资讯以做监测。系统会将车内外资讯以立体图绘制于行动装置介面上,以增加资讯的建鉴别度。此外,系统更以伺服马达机构来将功能最大化的发挥,同时也设计了一套可符合大多车种的装置结构,打造出可跨越车种、低廉而具备一定实用功能的主动侦测防护系统。
前言
台湾是一个人口密集的城市,交通网络有时须仰赖多数车辆往返地运送。然而,机车危险驾驶、车辆的违停,都迫使着车辆往往必须在车阵间穿梭,这成为了台湾交通上的一个重大隐忧。
因此,目前先进驾驶辅助系统(advanced-driver assistance systems, ADAS)的关键技术中,主动式雷达系统具有相当好的发展性,能辅助驾驶侦查周围环境。但是这样系统并无法套用于所有的车辆上,如果想要侦查系统,就必须购买新车或是以高价改造车辆,更别说最需要支援服务的大型车种更是完全无法享有到服务,让该项技术的发展受到局限。
因此,本作品希望能打造一套可用于目前市面上大多数车种的主动式侦测系统,并打破各车厂间车辆性能上的隔阂,以最低的成本创造出高价值的系统服务,打造出可跨越车种、低廉而具备一定实用功能的车辆行车安全与防护系统。
本作品是以盛群半导体所推出的HT32F1765微控制器作为开发,结合都普勒微波雷达、超音波感测器、伺服马达与OBD-II的资讯整合平台。此作品可对车内外进行监测,OBD-II采用符合国际标准协定之规格,撷取车辆上ECU的感测数据,以取得行车资讯。
此外,车外监测可透过都普勒雷达与超音波感测器进行障碍物的距离侦测,再配合伺服马达增加感测系统的可视范围,以用单一雷达完成全方位监控。同时,所有行车资讯会透过蓝牙接收并汇集到Android的行动装置上加以显示。其中,Android显示画面是以立体图来作呈现,画面会以模型车来模拟实车本体,并于三维空间建置出车辆周围的状况与车内的安全值。
再者,藉由多种警示功能将可增加驾驶者的安全性。当车子发生状况时,能够第一时间警告驾驶者,降低发生事故的机率。此外,系统还具备储存功能,可将行车资讯存至SD卡,可于事后重新回拨行车资讯,以找出状况原因或是意外发生之时段,具备行车纪录之功能。
工作原理
车辆行车安全与防护系统主要系统功能分为两个部分,分别为二维扫描器与Android显示平台。以下,将详细说明个别功能:
二维扫描器
本系统使用两组二维扫描器,并配置于左右两侧的后照镜上。扫描器的控制晶片为HT32F1765微控制器,并使用其ADC、PWM控制功能,以及SPI与UART串列通讯介面。
其中,二维扫描器以都普勒微波雷达搭配超音波感测器作为主要的测距系统,伺服马达可带动感测装置,进行200度的旋转,并透过主动侦测的方式识别前方目标的位置并加以记录。此外,在每一轮扫描中,右侧的二维扫描器会有两次透过CAN通讯协定将数据传送至左侧二维扫描器。同时,左侧二维扫描器也会透过CAN对OBD-II进行资讯撷取,并将所有资讯以蓝牙传送至Android显示平台。
当车辆的速度超过预设的速限时,系统将会由低速模式进到快速模式。此时,系统将改变扫描角度由200度变为40度进行一次收发资料,扫描数据将限缩至固定方位,但每一轮的资料传送将会变为十次,使系统能应对高速下的瞬间数据撷取,并让数据能保持在即时的状况下显示。
Android显示平台
Android显示平台在接收到二维扫描器的资讯之后,会将各角度之距离转变为座标,绘制于立体图之上。同时,对与所有数据进行安全性判断,并将超音波的数据以立方体显示。而雷达数据是以圆形表示。其中,在低速模式下,会以超音波的数据为基准,对周边进行近距离、高精准的障碍物座标化。在快速模式下,则会以雷达的数据为基准,对长距离进行有效的范围侦测,并表示出远近距离。
此外,驾驶者可透过图形直觉的辨识车辆状况,也可透过系统的警告系统来做判断。系统会根据数据做出前后车过近、旁车靠近、左右后方来车的判断,并以灯号来做表示。此外,驾驶者可选择是否开启车内资讯的功能,介面上会显示该车辆OBD-II中所包含的ECU资讯,并以列表方式呈现,或是让系统自行判断,当车内异常时,系统将会立即发出警告,并说明出问题的节点资讯。
而系统具有行车记录之功能,每一次的驾驶将会被数据化为该次的驾驶纪录,并保存至SD卡中。
驾驶纪录会记录该次的最快、平均速度等资讯。若有异常也会特别标注,调阅驾驶纪录后,可完全重现该次的驾驶情况,并能完全保留所有的功能操作,让使用者能有完整的系统服务。
作品结构
硬体说明
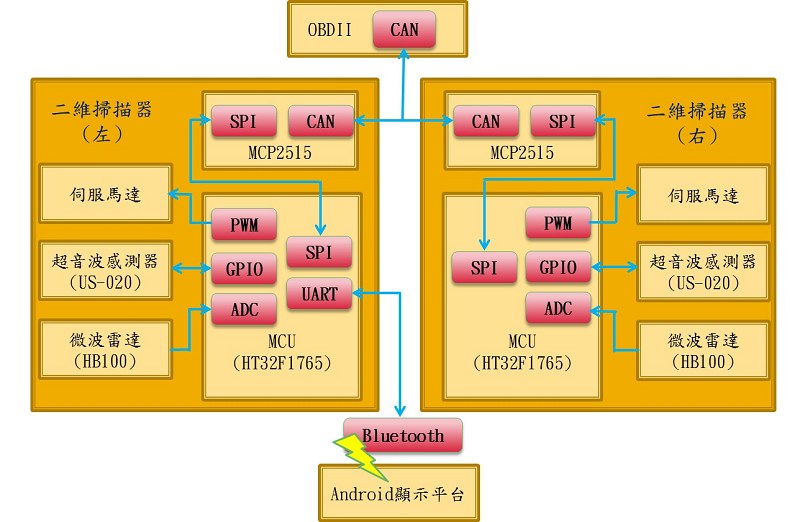
如图1所示,为整体系统硬体架构方块示意图。其中,整体系统是使用盛群半导体的微处理器为基本的控制与处理核心。
在本作品架构中,会透过两组二维扫描器扫描车体两侧的障碍物资讯。其中,右侧二维扫描器透过CAN传送数据至左侧二维扫描器进行资料整合,同时左侧二维扫描器会经由CAN向OBD-II要求车内资讯。这些资料将会在左侧二维扫描的控制晶片内进行整合后,并透过Bluetooth模组将资讯传至Android显示平台上。
以下,列出各硬体元件:
HT32F1765:二维扫描器控制晶片。
MCP2515:SPI讯号与CAN讯号转换晶片。
伺服马达:装置转动控制之PWM马达组。
US-020:超音波距离感测模组。
HB100:都普勒微波雷达模组。
蓝牙:HL-MD08R蓝牙模组。
OBD-II:OBD-II讯号来源,使用ECUsim 2000模拟器。
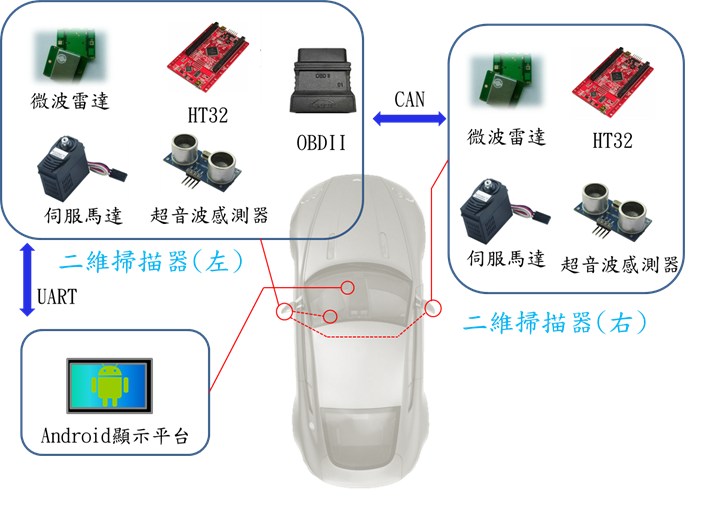
如图2所示,为系统架构图。本作品装置可挂载于后照镜上,并将讯号线拉至车体之中。此时,CAN汇流排可穿过车体仪表板后连至对面的二维扫描器,同时连接位于方向盘底下的OBD-II接头。此外,系统可透过点OBD-II接头取得电源供应。最后,Android蓝牙传输方面,则直接接收左侧二维扫描器发出的蓝牙讯号。而如图3所示,则为二维扫描器之实体图。
整体系统,在设计上包含MCP2515 SPI-CAN通讯介面转换、超音波测距及都普勒微波雷达测距等部分。以下,为这几个系统区块的设计方法:
MCP2515 SPI-CAN通讯介面转换
由于HT32F1765(微控制器)不具备CAN的通讯介面,所以采用Microchip公司推出的MCP2515(SPI-CAN通讯介面转换晶片)。其中,由HT32F1765的SPI介面,再根据MCP2515之各种阶段工作模式之暂存器位址与指令来对MCP2515加以控制,以达到SPI转CAN协定的功能。
如表1与表2所列,为MCP2515传送暂存器位置表与MCP2515接收暂存器位置表。
表1:MCP2515传送暂存器位置
暂存器名称 |
功用 |
位址 |
TXBnCTRL |
传输缓冲器控制暂存器 |
30或、40或、50或 |
TXRTSCTRL |
TXnRTS的脚位控制与状态暂存器 |
0Dh |
TXBnSIDL |
标准IDE传输模式低位元组暂存器 |
32或、42或、52或 |
TXBnEID8 |
扩展ID传输模式高位元组暂存器 |
33或、43或、53或 |
TXBnEID0 |
扩展ID传输模式低位元组暂存器 |
34或、44或、54或 |
TXBnDLC |
传输资料长度设定 |
35或、45或、55或 |
表2:MCP2515接收暂存器位置
暂存器名称 |
功用 |
位址 |
RXBnCTRL |
接收缓冲器控制 |
60h |
BFPCTRL |
RXnBF脚位与状态 |
0Ch |
RXBnSIDH |
标准ID接收高位元组 |
61或、71或 |
RXBnSIDL |
标准ID接收低位元组 |
62或、72或 |
RXBnEID8 |
扩展ID接收高位元组 |
63或、73或 |
RXBnEID0 |
扩展ID接收低位元组 |
64或、74或 |
超音波测距
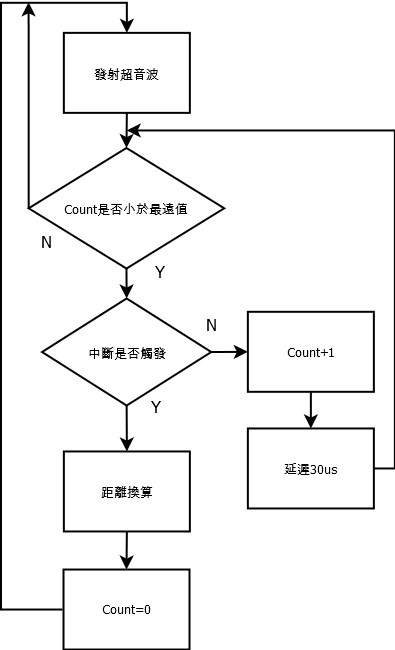
以GPIO控制之超音波模组在发出10us的时间后,会在一段时间后收到回传讯号,并使外部中断产生触发。而在回传这段时间内,利用Counter与透过以下公式1来计算出所花时间:
[(Counter*time)/29(ms)/2] 1
在此,可得到精度1cm的距离资料,及最远距离可延伸至5公尺。当超音波击出后便会开始计数,直到收到回声或是超出计数上限时才会再次击出。而每一角度的时间内超音波可进行至多一百次的收发。其中,每一轮扫描可获得至多2000笔资料,在经由系统演算处理,并合并同一角度的资料后,将会过滤成20个角度的有效资料,以提供系统后续操作。如图4所示,为超音波控制流程图。
都普勒微波雷达测距
都普勒微波雷达是范围式的连续电磁波讯号,回传的讯号会因目标物的动量而产生都普勒平移,使得接受到的讯号会和发射讯号产生讯号差。当目标移动速度越快,回传的讯号频率越快与越强,相反的,若无移动则会呈现没有讯号。
而市面上的雷达测距采用的是频率调变(FMCW)雷达测距,其架构是以都普勒雷达为基础而改良的雷达技术,并利用在一段时间内改变发射源的频率讯号,利用不同频率在目标产生的频率差,来与距离成正比的方式进行测距。然而车载用的频率位于77GHz,高频段的频率调变需使用特殊的制程方式,一般市面上较难以取得。在此,为了使测距雷达能够达到通用的设计理念,我们将目标放在以最简单的设计方式来达成测距功能,而使用自行研究的讯号增益测距来达到测距目的。
此外,都普勒雷达是藉由讯号差的判断可以分析出目标的移动量,我们以都普勒雷达作为技术的基底进行设计。而在测距上,为了增加可运用的讯号侦测方式,我们加入了RSSI技术,RSSI技术是透过反射能量衰落程度判断目标的距离位置,因而被用于无线电的测距。然而,都普勒雷达因为其能量强度与频率会受到目标位移量大小而有极大的差异,并无法直接以RSSI取得目标距离。针对这部分,在算出当下目标的频率讯号后,只会撷取一定范围内的讯号,并排除掉高频与低频讯号,使系统只会针对目标在一定移动速度下所产生的数据进行判断。
此外,在原始的讯号强度上,距离每多2至4公尺,讯号会以90%以上的比例衰减,因而导致远距离下讯号会因为衰减而侦测不出差异。此时,利用讯号增益的方式,来针对衰减的讯号进行放大,这会使得原本侦测不到的讯号得以被放大成正常讯号,但同时也会导致原本距离下的讯号被放大至无法辨识的饱和状态。而饱和与衰落之间的距离区域,我们定义其为「有效讯号」。当在增益倍率下,讯号由衰减或是饱和状态进入「有效讯号」,那就可以逆推出目标进入了一个特定距离位置。
根据此算法,我们测计了六组的增益倍率,在25公尺内无间段的绘制出六个距离区域,其「有效讯号」皆在不同区域,利用不同组增益倍率的ADC讯号来侦测目标位置。讯号上出现介于衰减与饱和交替的区域,则可判断出目标落于哪个距离。此作法活用了都普勒特性与RSSI原理,使系统在装置的转动状态下能获得更具效率的侦测。而整体设计上,因是针对输出讯号进行改良而非改变发射源,硬体设计上相对容易,能有效地压低设计难度与成本。
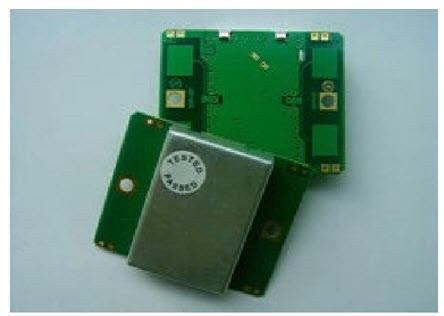
在此作品中,所使用的HB100都普勒微波雷达是市面上可以以极低单价购得的雷达模组,其雷达发射频率约为10.52GHz,及输出讯号约为100Hz。
如图5所示,为HB100微波模组的实体图,其利用都普勒雷达(Doppler Radar)原理设计的微波移动物体探测器。
因为是采用都普勒的方式,辨识上需要同时藉由多个波形讯号分析其动量。因此,每一轮扫描,仅会有5次的雷达资料,其有效距离可达到25公尺远,用于判断车辆的5个方位的障碍物距离。
软体说明
系统使用者介面采用Android作为显示平台,并透过Unity3D加强介面的呈现方式。系统藉由蓝牙无线连线的方式将资料由硬体端接收后,会将资料转换到Unity3D系统之中进行运算,并加以绘制成三维立体图。而在系统软体端的设计上,可分为Android应用程式与Unity3D应用程式。以下,各别介绍其设计方式:
Android应用程式设计
Android是基于Linux核心的软体平台和作业系统,早期由Google,后由开放手机联盟开发。美国检索公司Google在2007年11月5日公布的手机系统平台。它采用了软体堆层(software stack,又名以软体叠层)的架构。底层以Linux核心工作为基础,只提供基本功能,其他的应用软体则由各公司自行开发,并以Java作为编写程式的一部分。本系统运用功能如下:
启动蓝牙
于Android应用程式中,将会开启与二维扫描器的功能连线,只有在蓝牙连线的情况下,并接收到开始的命令,二维扫描器才可正常运作。当二维扫描器接收到停止的命令时,则会停止所有的动作。
功能设定
可设定软体端的相关设定,包含扫描显示模式,后摄影机开关,或是车讯资料纪录天数等设定。
车讯纪录
系统执行过程中,会将获得的车辆资讯(车讯)完整的记录起来,并保存于SD卡中以时间顺序加以标记,完成车讯纪录的功能。因此,驾驶者可于车讯纪录中,调阅过去行车纪录。其中,除了查看当时的统计数据外,还可完整重现当时的行车数据变化,同时还能保有所有的操作功能。
Unity3D应用程式设计
Unity3D是一个用于创建诸如三维视讯游戏、建筑可视化、即时三维动画等类型互动内容的综合型创作工具。 Unity类似于Director、Blender、Virtools或Torque Game Builder等利用交互的图型化开发环境为首要方式的软体,其编辑器执行在Windows 和Mac OS X下,可发布游戏至Windows、Wii、OS X或iOS平台中。此外,也可以利用Unity web player外挂程式发布网页游戏,支援Mac 和Windows的网页浏览。而其运用功能如下:
超音波座标化
在接收到超音波的角度对应的距离数据之后,系统会透过三角换算的方式,将角度值换算成座标,并在Unity上以立体图做显示。驾驶者可以看到画面上至多出现的40个目标座标,其与自己车辆的距离位置。
雷达距离图形化
在接收到雷达的距离数据之后,系统依据距离值将雷达侦测到的数据以不同大小的圆形标记于模型车四周。有效距离可达到25公尺远,驾驶者可以清楚看到车辆的死角上是否有障碍物。
车内资讯显示
在接收到OBD-II的行车资讯之后,系统依据对应的编码以清单方式列出其内容,可让驾驶选择性查看车内的各项行车资讯。
行车安全警告
车辆行进间,除了各种图形显示外,系统也具备主动式的警告功能,系统会针对驾驶间需要注意的项目,如前车车距,左右来车等提供了警示灯号的方式,让驾驶可以方便的察看车外状况。灯号分成前车过近、后车过近、左方靠近、右方靠近、左方来车与右方来车等通知方式。当行车车况处在严重危险范围内时,系统会以警告的方式让驾驶注意。同样的,系统也会对车内资讯作完整的监控,一旦有异常时,会立即通知驾驶该数据发生状况。
测试方法
为了检视系统中数值是否相同与合乎协定格式,我们利用分析仪与示波器来进行检测。其中,检测的项目分别为MCP2515 CAN-SPI通讯介面转换检测、超音波反射讯号、都普勒雷达讯号、以及讯号增益测距检测。
MCP2515 CAN-SPI通讯介面转换检测
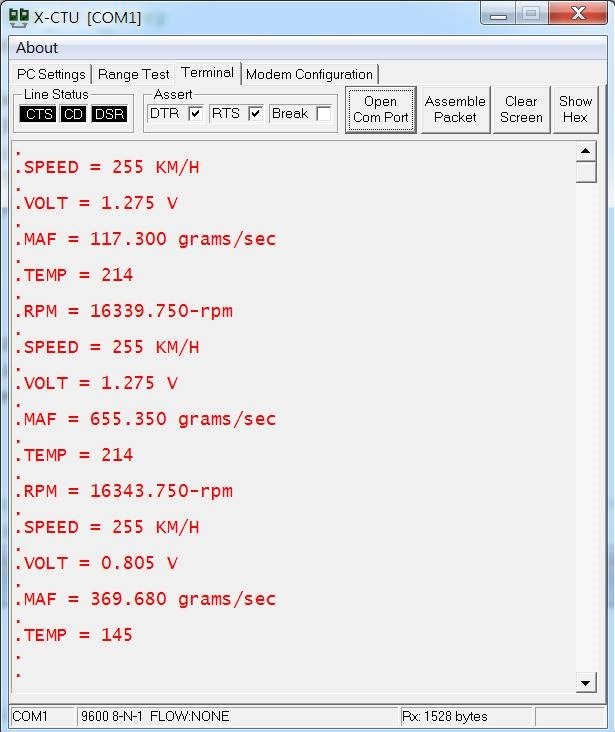
在此测试上,是配合OBD-II的CAN传输速率(500 Kbps),并把OBD-II模拟器上之5个节点包括时速、电池电压、进气空气流率、引擎温度以及引擎转速之资讯,透过CAN协定传至MCP2515元件中。而MCP2515会自动把资讯转换成SPI介面的资料格式。最后,连接至HT32F1765的SPI介面接收中断脚位来得知车内引擎上的节点资讯。
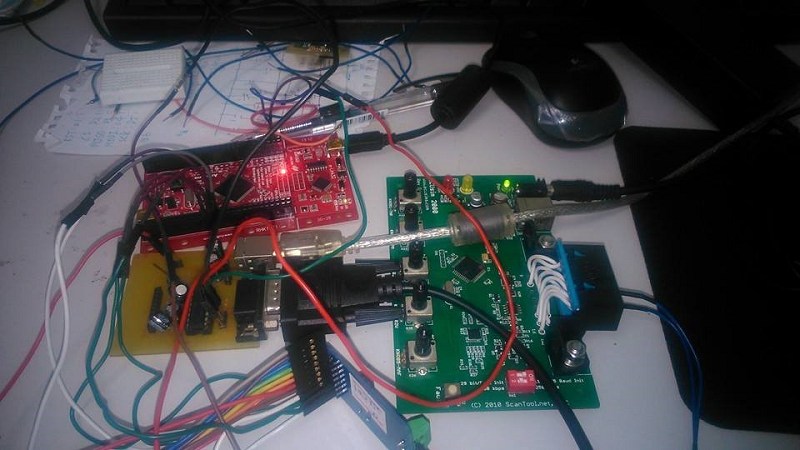
如图6所示,实际连接示意图。而撷取数值的画面则如图7所示,该对应数值为每个节点接收到的资料数值。

| 图6 : HT32F1765与OBD-II模拟器通讯实体图 |
|
超音波反射讯号
超音波触发讯号后,会等待18ms的时间后接收反射。当接收到讯号,会让脚位致能为高准位,以用来触发内部中断脚位。如图8所示,为抓取到的雷达类比讯号检测图。
而超音波接收数据的资料量与距离会呈现反比关系,目标的距离越远、延迟时间就会越长,资料量就越少。同时,系统是让发射头在旋转的状态下进行扫描,若反射时间过久将会造成入射角偏移使资料遗失。因此,检测重点将在于如何让资料能够最大化。此部份我们让超音波的扫描距离由近向外增加,并估算资料回传数量介于15~20笔的距离。另外,考虑到行车速度会影响超音波的数值,所以同时针对于装置平移下的数值变化做相同的取值动作。
都普勒雷达讯号
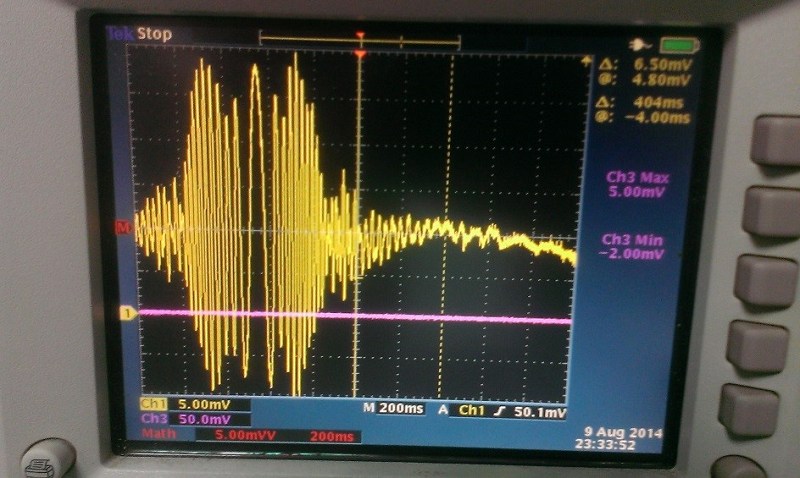
都普勒雷达输出讯号为0至5V内的讯号变化,并透过ADC转换后可得其数位值。目标于发射路径上位移时,会产生震幅变化与频率变化。如图9所示,为未增益的讯号于4公尺内有一目标由远至近逼近,在突然反向至远的变化量,能明显看出在近距状态下讯号明显增幅,且在速度折返的位置频率突然降低。透过此讯号的变化可以发现到,2公尺以外的讯号变化衰减至10%左右,而在2公尺内有明显的讯号高度。因此,可以设定当下的「有效讯号」距离为0~2公尺。
讯号增益测距检测
根据都普勒雷达输出讯号的量测后,我们有了初步的讯号范围,此时,再透过OPA放大器,对于原讯号进行放大。其中,有效的增益距离的采用方式,是先预设一个讯号倍率,然后让ㄧ目标从发射源向外移动。移动初期,讯号会有一段距离会维持在饱和状态,一直到一定距离后才会出现明显的讯号变动,而这交界值即为有效讯号的最短距离。此后,在继续移动一段距离后,讯号会出现大幅衰减,此即为有效讯号的最远距离。
最后,计算该距离长度后即可更换新的倍率并做重复同样的测量,并挑选有效值域不会重复的倍率作为测距倍率。如图9所示,为测试实体图,于无干扰的场所侦测装置的最远距离与有效值域,可测得的距离约可达25公尺。
结果与讨论
如图10所示,为Android主画面,其可设定以下功能:
扫描启动:进入扫描画面。
系统设定:设定软体端相关参数。
车讯检视:回顾过去的行车纪录。
蓝牙开启:点选左下角字样可开启蓝牙。
Android应用程式可执行以下功能,当有目标过近时,会显示警告。
车速检视:画面右上角可以查看车辆目前速度。
车内资讯:点击左下角可查看目前车内各节点的资料。
俯视切换:可以将目前画面与小视窗切换。
地图绘制:系统会直接将障碍物绘制于车体四周。
灯号警示:若有障碍物出现于危险范围内时,系统下方会出现警示灯号。
返回:返回主画面。
结论
经由上述的测试结果与系统设计的说明,可知车辆行车安全与防护系统的相关特性如下:
系统创新性
车用雷达系统是近年ADAS的发展中,需建置的车用系统,其可大幅增加驾驶者的安全性,但是技术的通用性不高,即使日后推出相关产品,也仅会成为新车的专用系统。而本系统主打的通用性,别于目前主流雷达技术,采用自行研究的雷达测距技术,并使用目前价格非常低廉的都普勒微波雷达作为测距主体,因此,能最大化的压缩感测系统的设计成本。
而系统的资料处理集中于左右两组二维扫描器上,透过简单的连接就能使系统正常运作,完全不需拆动车体。其中,除了OBD-II的接头外,不会和车内线路有复杂的直接连线。因此,系统可通用于任何车型车种,可以实现跨车种的使用方式。
目前市面上的雷达系统皆为单向发射,没有办法做到完整的车体防护。而本系统采用伺服马达搭配主动式侦测系统,透过伺服马达来改变发射角度,可以使用两组的发射器来做到超过300度的安全防护。除了大幅的改良成本问题外,多方向侦测更提升系统的价值与功能,使成本及效率可以达到最佳化。
系统实用性
本作品使用的OBD-II接头符合SAE J1962协定,因此,使用者仅需搭配其命令格式,即能撷取实际车辆上的ECU资料。其中,感测系统主要采用微波雷达,为电磁波讯号。在用于障碍物侦测当中,其会受到的干扰最为微小,不受外部亮度、温度、湿度影响。因此,在雨中也可保有一定的侦测力,同时系统也使用超音波作为辅助感测,使近距离的准确度更为明显。
而车辆在行驶之中,会因为速度而影响感测器的准确度。本系统可在不同速度下,启用不同的侦测模式。如此,使系统受到速度影响达到最小,并增加系统的可靠度。
因此,经由本系统的设计与实现,可将主动安全这一系统从车载系统中独立出来,使其具备跨越车种之功能,并达到行车安全与汽车防护的目标。
(本文作者许永和任于国立虎尾科技大学资讯工程系教授;张庭玮、曾柏谕、陈建忠为国立虎尾科技大学资讯工程系研究生)