随着科技与经济日益,车辆数量不断增加,伴随而来的窃 盗案一 件又一 件的发 生,防 不胜防,因此防盗器渐渐成为不可或缺的附件。目前市售的防盗器在车体是否被窃盗或破坏的判断上有所误差,容易误触警报器而引起不必要的误会,一般防盗器也只能让车体发出警报声,却无法立即通知不在车辆附近的车主,做出立即的反应。
作品融合现代科技技术,将体积缩小、降低成本与耗能,让作品能够更广泛运用到更小的车体上, 例如脚踏车及宠物狗的项圈上,并且增加紧急呼叫功能,用在拐杖或是小朋友的随身物品上,可以主动的触发警报。而在导航端,因现在人手一机,所以结合智慧型手机作远端控制,使作品能更贴近人性化、实用性、低成本及高准确率的目标,希望能降低窃盗意外的风险,保障使用者的财产,为生活安全尽一份力。
市售的防盗器大致上可分成三种,机械式防盗、电子式防盗与GPS防盗,由于GPS防盗器价格昂贵,因此本作品以电子式防盗器为基础,加以设计改进其缺点,并结合机械式的优点(价格便宜)与GPS的优点(精确且可回传资料),让原本属于电子防盗器的作品更加普及实用。
前言
目前市面上的车辆防盗器大多数容易误判形势,导致产生不必要的噪音,造成使用者与周围的人的困扰,而且大多数是针对汽车而设计的防盗器,并不适用于自行车或体积较小之交通工具,有鉴于此,本作品结合模糊控制理论研究出具有高精准度、低误判率的防盗器,并致力于缩小体积、降低成本与耗能,使其能适用于体积较小或无额外供电系统的交通工具,且具备断电警报功能,即使防盗器本身被破坏或拆除,遥控器端仍然会发出警报,大大的降低了被窃盗的可能性。
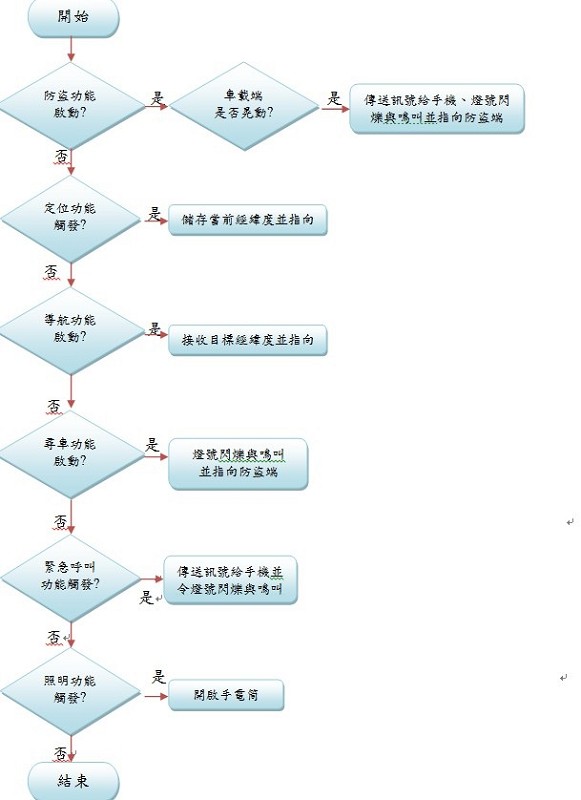
作品主要有五个功能:远端监控系统、定位寻车系统、防盗系统、紧急呼叫功能及导航照明系统,利用无线传输技术,可透过导航器开启或关闭各功能;定位寻车系统开启时,导航端会传送一个指令给防盗端并防盗端发出声响和闪烁灯号,当防盗系统开启时,微控制器会指示模糊控制系统开始判断由加速度感测器传来数值,并适时的发出警报,如开启无线网路监控系统,导航端与防盗端会不断互相传送密码给对方,在接收不到密码时表示已离开通讯范围,会马上发出警报,当遭遇危险则可按下紧急呼叫,导航端会藉由蓝牙传送讯号通知手机发出讯息求救,而导航照明是藉由电子罗盘的磁北极方向与GPS提供的经纬度或是利用手机提供的目标经纬度资讯进行定位,再经由LED灯进行导航。
作品使用盛群微控制器--HT66F70A作为主要的微控制器,其功能如下:
I/O port:LED 状态显示灯与警报蜂鸣器。
Timer:模糊控制系统的时间参数。
Interrupt:触发警报时的中断。
ADC:三轴加速度感测器的类比转数位。
UART:发送与接收蓝牙及 Zigbee 无线通讯模组的资料。
SPI:接收由另外 IC 所接收的 GPS 讯号。
相对于市面上的防盗器,作品除了功能多样化,更能精确的判断出是否有窃盗行为发生,彻底改进电子防盗器容易误判情势发出警报的情况,而且由于无线网路监控系统属于全双工系统,即使偷窃者技术再高超,当离开监控范围时,遥控端依旧会主动触发警报,而不需要等待防盗器的指令才发出警报,因此作品的可靠度相当高。
工作原理
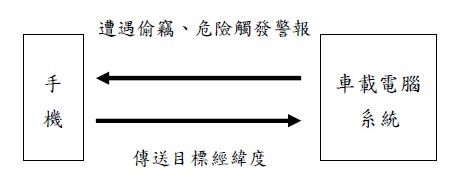
作品使用微控制器HT66F70A、三轴加速度感测器、GPS模组及Zigbee通讯系统,并结合智慧型手机及蓝牙通讯系统,可分为导航端系统与车载系统两部份。
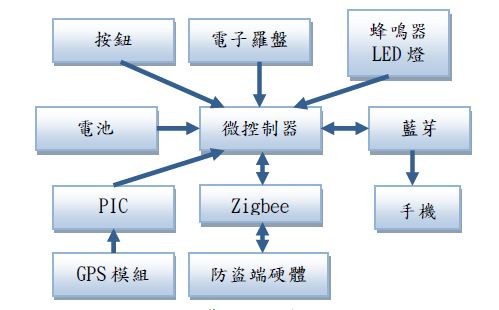
导航端系统
导航端系统配置主要设计有控制器HT66F70A、GPS 模组、电子罗盘、蓝牙、Zigbee无线通讯模组与警报器。作品蓝牙部分与智慧型手机的APP程式结合手机蓝牙,搭配google地图选择其导航的目标地,Zigbee部分做为导航端与防盗端的联系用途,微控制器透过自身GPS模组接收的经纬度,与从手机或防盗端接收的经纬度作计算,再透过电子罗盘找出方位后,显示于LED指示方位,再使用不同功能按钮来控制,其控制按钮分别为定位、防盗、快速寻车、紧急呼叫及导航功能。
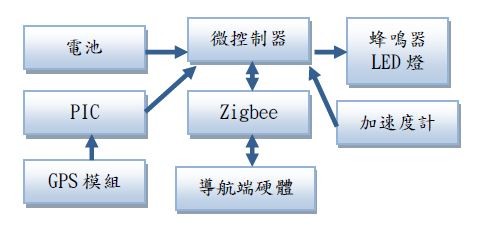
防盗端系统
防 盗 端 系 统 配 置 主 要 设 计 有 微 控 制 器HT66F70A、加速度感测器及 Zigbee 无线通讯模组与警报器。微控制器透过Zibee接收动作指令,分别开启防盗与快速寻车功能。防盗功能主要透过加速度感测器的电压讯号做为输入值,接着由模糊控制系统判断符合的实际状态,判断是否要触发警报器。快速寻车功能由微控制器接收到导航器的启动指令后,会持续从导航端往防盗端传递讯号,开启车载端的蜂鸣器及灯号,令其持续发出声响、闪烁灯号与回传车载端之经纬度,让使用者可循声光及导航端指示迅速找回失物。
| 图一 : 由模糊控制系统判断实际状态是否符合必须触发警报器。 |
|
模糊控制理论
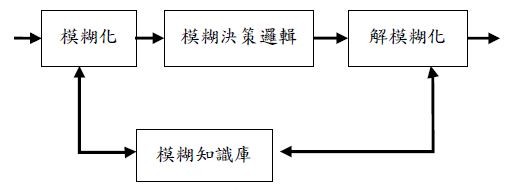
模糊控制系统其动作过程如图二所示,其基本架构及设计步骤主要分为四个部分:
模糊化
模糊化为模糊控制器设计的第一步骤,即是将精确的输入量转化为模糊量。精确量经对应关系转换为标准论域上的基本元素,在该元素上具有最大隶属度的模糊子集,即为该精确量对应的模糊子集。
模糊决策逻辑
决策逻辑是模糊控制器的主要处理单元,也是整个控制器中的核心所在,其所具有的能力就如人类制订决策的能力一般。决策逻辑可以在接收输入资料后经由知识库的辅助进而判断出决定输出的对应值。
模糊知识库
模糊知识库包括模糊控制器参数库和模糊控制规则库。模糊控制规则建立在语言变数的基础上。模糊控制法则的建立及其控制策略,主要有四种产生法则:
a.由专家的知识和经验获得。
b.根据操作员的控制行为订立规则。
c.根据被控制系统的特性定立法则。
d.藉由自我学习的方式获得。一般的规则库多以“if…else…” 此种语意陈述的条件法则来表示。
解模糊化
解模糊化基本上是将推理得到的模糊子集转换为精确值,以得到最终控制量输出以供外界系统使用。而整个工作细节是将推理引擎得到的结果,经由解模糊函数转成一适当的非模糊数,在经由比例映射传出,得到最终控制量,提供被控系统操作使用。一般最常使用解模糊化方法为重心法,本系统亦采取此方法, 重心法又称为力矩法。
作品中利用模糊化,将加速度感测器侦测出来的加速度值依照大小,转换成不同的变量,再将模糊化后的加速度值与持续时间的长短作为模糊决策逻辑用的参数做比对,并判断出各种组合所对应的输出,并在模糊知识库中定义模糊决策逻辑作出判断之不同程度的反应(例如蜂鸣器的叫声的不同),最后透过解模糊化将输出转成LED 的亮光与蜂鸣器的声响。
作品整体系统大致可分为 5 类:
1.无线网路监控系统:此功能主要是利用导航端与防盗端各别装载的ZigBee 无线模组建立无线监控网域,并透过防盗端与导航端之间的讯号传递判断车辆目前是否于监控范围内。若导航端或防盗端讯号中断,则会触发两作品内部警报器。
2.快速寻车系统:使用者可透过导航端启动此功能,此时防盗端硬体会发出声响、亮起提示灯并传车辆的经纬度至导航端,导航端会指向车辆的位置,令使用者能够快速寻得车辆。
3.防盗系统:使用者可透过导航端启动此功能,此时微控制器会开始转换由加速度感测器传来的电压值,并透过模糊控制系统判断是否有遭窃盗的状态反应,一旦判定为异常会告知导航端、手机及防盗端本身一同发出警报,防盗端亦会传送经纬度至导航端,令使用者车辆状态异常的同时能迅速寻找车辆位置。
4.紧急呼叫:使用者可透过导航端按钮启动此功能,主要为了避免使用者在路途中遭遇紧急状况,而无力使用手机等求救装置所设置的快捷按钮,按下时,导航端会发出声响及闪烁灯号,并透过蓝牙传送讯号通知手机向外传送简讯等讯息求救。
5.导航照明系统:使用者藉由按下作品按钮开启定位功能或导航模式,而导航模式则可藉由从手机设定目的地位置,令作品指向目标方位;定位模式则是储存当前位置的经纬度当目标位置,并指示方位以此避免迷失方向。
由于体积小、低成本与低耗能,使其能应用的层面不仅止于汽车,自行车或动力机械脚踏车等交通工具皆适用,且因结合了模糊控制系统,使其在判断上更为精准,大大降低了误判率,还有破坏警报功能,提升了安全性与可靠性,让作品更有市场竞争力。
作品结构
硬体部分
导航端的按钮能启动定位、导航、照明与紧急呼、防盗及紧急呼叫功能,并透过微控制器判断是否要发出警报,蓝牙与Zigbee 无线通讯模式由于有传送资料与接收资料,故为双向传输,且作品致力于减少防盗器的总体积,在布线方面尽可能的减少面积,并使用体积较小的SMD系列元件,使体积缩小。
导航端硬体
导航端硬体架构图如图四所示,输入为按钮和蓝牙,电力来源为5V干电池,输出方面有蓝牙、警报蜂鸣器与高亮度 LED 灯。蓝牙、GPS
模组及 Zigbee 利用 UART 通讯协定完成,PIC 与 HT66F70A 使用 SPI 沟通,其余皆由 I/O 脚位 完成。
防盗端硬体
防盗端硬体架构图如图五所示,而硬体端不设置按钮,直接使其随时传递GPS 讯号至导航端备用,直到导航端按下寻车按钮或是遭偷窃时开启功能;加速度计利用ADC 完成,其他使用的通讯协定同导航端硬体。
软体部分
手机程式一开始检查有无资料被传送进来,当有任何一笔资料进来后便启动相对应的功能并亮起状态指示灯,手机程式流程图如图六所示。
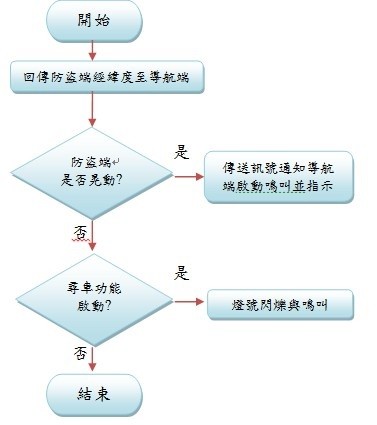
防盗端程式在防盗功能开启后便会驱使模糊控制系统判断由加速度感测器传来的资料是否有窃盗的状态,若判断为窃盗则发出警报,将回传讯号通知导航端及手机。另外若紧急呼叫触发会直接启动警报器,并通知手机端传送紧急讯息。
导航端程式一开始检查五个开关有无被按下,当有任何一个开关触发后便启动相对应的功能并亮起状态指示灯,功能启动中如再次按下相同的开关便会关闭功能,且会强制停止此功能造成的警报。
导航端与防盗端的警报功能为同步动作,但当其中一方在无线监控网路功能开启且遭到破坏时,因作品具有全双工系统,故另一方一样能发出警报。此外每个功能可以同时启动且各自皆能正常工作。
测试方法
寻机功能测试
由测试结果显示当遥控器按下按钮时,遥控器会发送开启寻车功能的讯号,此时车载端接收到讯号后启动功能并令灯号闪烁及鸣叫。
防盗功能测试
将车载端放置于自行车上,并将自行车摆放于路旁,测试砂石车经过或是施放炮竹所产生的声响是否会让感测器造成误判,而发出警报声,测试结果显示上述情况并不会使加速度感测器误判而发出声响,而当移动自行车时,则会发出警报声。
导航/定位功能测试
由于室内无法接收到GPS讯号,此测试需到室外完成,当导航/定位功能开启时,测试结果显示车载端会指向目标方位,原地转圈或是四处走动亦会随着面向的方位不同而随着改变指向。
紧急呼叫功能测试
由测试结果显示当车载端按下按钮时,车载端会发送开启紧急呼叫功能的讯号,此时遥控端接收到讯号后传送求救讯息并令灯号闪烁及鸣叫。
(作者李荣全1、 詹志洪2、刘亚殊3、刘胤4、张育诚5为国立虎尾科技大学飞机工程系1教授、2-5学生)