频率调变连续波(Frequency modulated continuous waveform;FMCW)雷达越来越流行,尤其是在汽车应用,如主动车距控制巡航系统(adaptive cruise control;ACC)。一个FMCW系统的发射器发送高频和大频宽的线性调频(chirp signal)讯号,所发射的讯号到达目标,并被反射回到接收器,其时间延迟(time delay)和频率偏移(frequency shift)则取决于和目标之间的距离及相对的速度。
藉由混和发送和接收到的讯号,时间延迟响应到差频(frequency difference)产生一个拍频(beat frequency),这能对目标距离[1]进行非常精确和可靠的估计。通常我们会使用多个天线进行空间处理和波束成形,因这可使侦测更加可靠或可形成一个定向系统(directional system),如图1所描绘的。
图说: 通道建模(干扰、目标、杂讯)天线阵列建模射频减损(杂讯、非线性、频率依赖) 波形设计(范围、解析度)资料分析之演算法
进行FMCW雷达的设计、建模和模拟,设计人员必须考虑的不仅仅是一般的行为, 在使用雷达方程式确定基本设计参数之后,设计者也必须分析RF前端所可能带来缺陷的影响。非线性、杂讯、频率选择性和元件运作超过超大频宽之间的不一致性,都会减少侦测讯号的实际动态范围。
藉由准确地建立RF前端模型,设计者可以进行复杂的硬体架构和数位讯号处理演算法之间的权衡(tradeoffs)分析。此外,它们可以评估以前的设计实现是否可被重新使用,依增强的规格来重新定位雷达;或者现成的元件是否可以直接被用于前端的实现上。
FMCW波形的确定
当设计一个新雷达系统时,我们第一个必须要应付的问题是要确定三角啁啾波形(triangular chirp waveform)的参数,以达到特定范围所需要的解析度,当我们考虑自动巡航控制时使用汽车远程雷达,通常频宽约占77 GHz千兆赫[2] [3]。
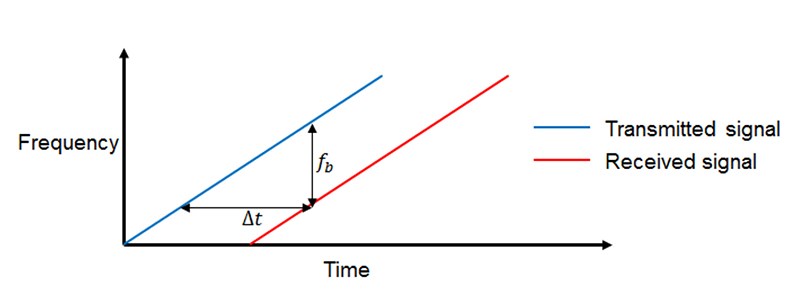
如图2所示,接收讯号是一个传送讯号之衰减及时间延迟的复制,其中延迟Δt和目标的距离相关, 因为讯号在任何时刻总是扫过一个频带;而频率差值fb ,通常被称为拍频(beat frequency),其传送讯号和接收讯号之间是恒定的,因为扫描是线性的,可以从拍频得知时间延迟,然后再从时间延迟推估到目标的距离。
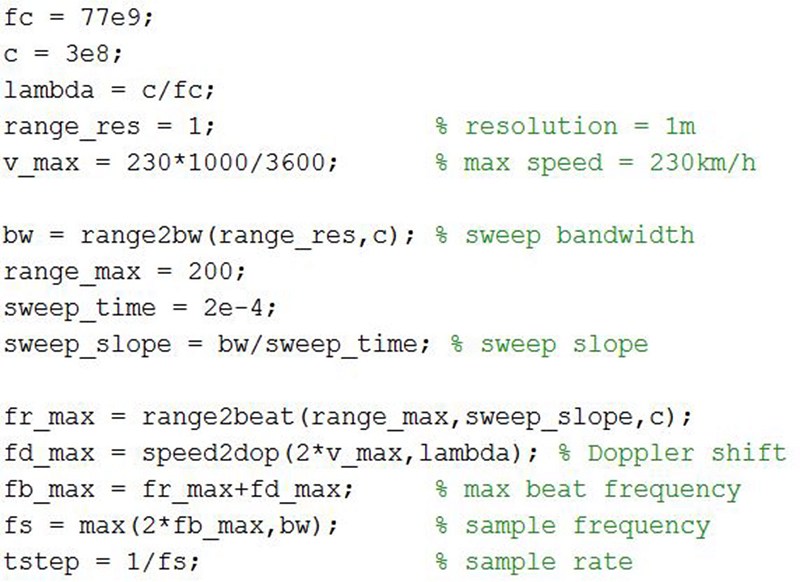
使用MATLAB和相位阵列系统工具箱(Phased Array System Toolbox)的功能,可以轻松地确定如图3所示的77千兆赫雷达的基本波形参数,如扫描频宽和波形斜率(slop)、最大拍频和采样频率(sample frequency),根据使用者界定的距离解析度和最大速度等。
RF元件、杂讯和非线性之建模
一旦线性调频参数已被确定,就可以继续进行雷达系统收发器的建模。
雷达系统的前端包括发送器、接收器和天线,这些模型在相位阵列系统工具箱中都有提供, 我们可以参数化这些模型给定所需要的值,如相位杂讯和热杂讯;或者,我们也可以使用Simulink中所提供的RF元件来建立发送器及接收器的模型,以及透过射频模拟模组(SimRF)来建立元件层级之杂讯、非线性以及频率选择等模型的效果。
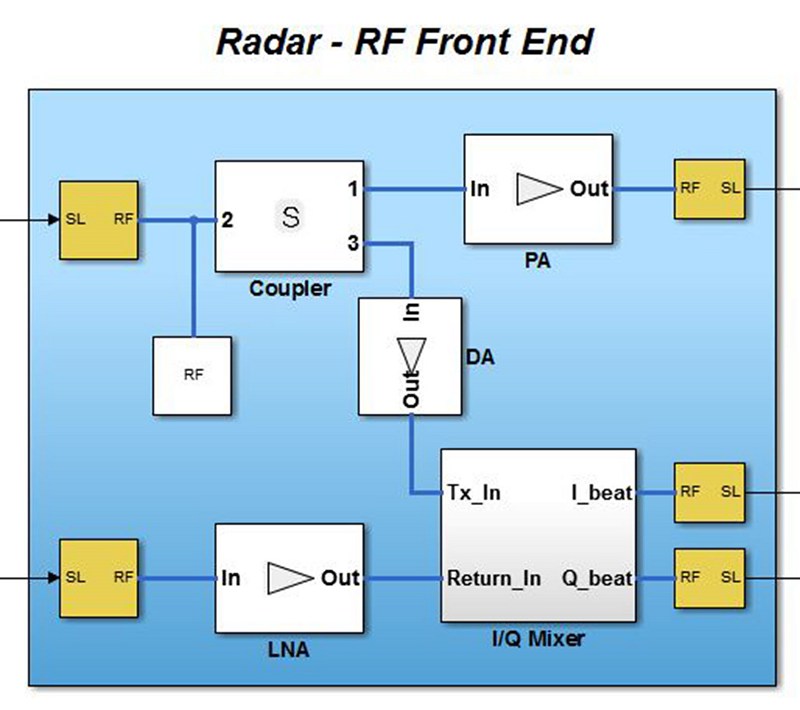
图4显示了我们如何使用射频模拟模组(SimRF)工具之模块来建立RF前端的模型;该函式库提供一个内含求解器的电路,能快速模拟射频系统和元件,例如放大器、混频器和S参数模块(S-parameter blocks)。
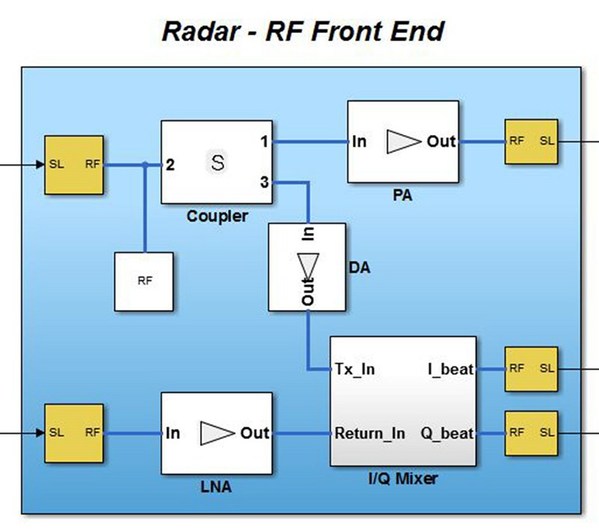
| 图4 : 在Simulink中使用射频模拟模组工具的电路模块来建立RF元件模型。 |
|
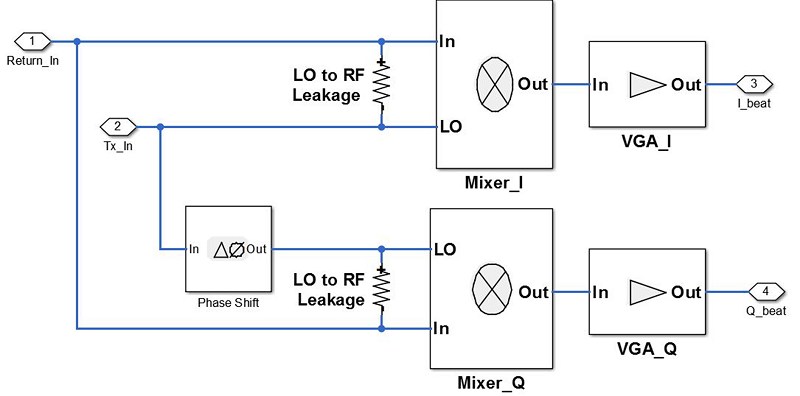
我们可以详细描述收发器的结构,并使用数据表给予每个前端元件相关参数,例如,I / O混频器的直接转换,如图5的建模,该元件对接收的讯号进行解调,并与原始的发射波形相乘。
在I / O混频器中使用的两个乘法器的参数已经在模块中直接设定,或者也可以使用工作区的变量。透过这样的设置,使用者能很容易地尝试及探索不同的设定,藉由使用不同的参数数据表来模拟现成的元件。
完整的系统模拟
当雷达系统的所有元件都已经正确的给予参数之后,可以进行一个完整的电脑桌机模拟,来测试系统是否会在不同的测试条件下正常运作。
当模拟运行中时,模型不仅能提供相对速度和物体之间距离的估计值,也能检视发送和接收讯号的频谱,如图6。
在理想情况下(无杂讯和失真的)执行的第一个模拟显示,使用中的所有目标其速度和位置都可以被正确地侦测到,这个模拟是为了验证测试环境以及数位讯号处理的演算法;至于后续的模拟中再加入接收器非线性和杂讯之后,雷达就偏离了理想行为,不能侦测到汽车离远的时候。
之后,我们再增加混合器的隔离和功率放大器的增益之后,雷达系统就能扩展其侦测的范围,进行再次模拟时,即可正确地估计所述目标的速度和范围。
因此,仔细权衡不同阶段的增益以避免接收机的饱和操作是非常必要的,本模型允许我们使用不同的参数组来进行模拟, 它还可帮助选择合适的雷达元件进行后续的实现,并验证这些元件对雷达性能的影响。
结论
本文使用了一些以MATLAB为基础的工具链,进行应用于汽车主动安全系统的完整的FMCW雷达系统之建模与模拟流程。我们所提出的工作流程,能够让使用者在一个完整的系统级模型中模拟RF元件,其中包括数位讯号处理演算法。这种方法能够同时降低雷达开发以及复杂系统测试的时间,同时可使整个开发周期的成本更低。
(本文作者1-John Zhao、2-Marco Roggero、3-Giorgia Zucchelli任职于MathWorks公司1-产品经理、2-应用工程师、3-技术行销工程师)
参考文献
[1] Design and Verify RF Transceivers for Radar Systems. Giorgia Zucchelli, MathWorks. mathworks.com/videos/design-and-verify-rf-transceivers-for-radar-systems-81990.html
[2] Automotive Adaptive Cruise Control Using FMCW Technology. mathworks.com/help/phased/examples/automotive-adaptive-cruise-control-using-fmcw-technology.html
[3] Karnfelt, C. et al. 77 GHz ACC Radar Simulation Platform, IEEE International Conferences on Intelligent Transport Systems Telecommunications (ITST), 2009.