机器人、遥控载具和遥测系统是控制应用走向更上层楼的新研究领域,而舵机是其主要关键零组件之一。数字舵机马达比传统马达有较高的精准度与较快的响应速度。在智能机器蓬勃发展的年代,自动控制及调整精准度是目前我们努力的方向。马达是现今民航机机舵主要的驱动应用。自动控制舵机比起传统由手动控制马达有更多优点:配合回传的电流数值使得马达稳定性增加,反应速度更快。且在切换为手动驾驶时快速的将机舵调整为当下适合的飞行模式。自动舵机马达的控制是灵活多元,可透过电流环、电压环、PWM等参数的改变,使自动机舵能在不同的环境下皆能快速的达到准确的位子,能产生效率的优化表现,提升飞机在飞行时的灵活度与应变紧急状况的能力。
本产品将利用盛群半导体所发展之HT66FU50与HT66FM2240芯片作为系统控制的主要电路组件。HT66FM2240透过H-Bridge输出来控制舵机马达,再经由位置环跟电流环闭回路设计,来监控目前马达负载与位置改变;再搭配程序算法来办别马达正确的运行位置,以利于控制马达达到最高精准度与高效能。HT66FU50为人机接口之主控芯片,本产品采用I^2 C与UART的方式,作为计算机端与马达控制端的桥梁。本产品重点在于设计并研究出适用所有市面上的舵机马达的开发平台。如此,便能省去舵机马达开发者许多时间和劳力成本。本产品以高性能与低价位来开创市场经济价值,值得加紧开发。
前言
创作动机
舵机马达的研发已持续许久,但靠普通舵机马达是无法精准迅速的达成各种环境的需求。因应这股风潮,数字舵机马达正快速发展在产业界,不仅运用面更广阔,控制面相对于传统马达更优化更有效率,普及到日常生活中也指日可待。
早期在模型上使用最多,主要用于控制模型的舵面,适用于那些需要角度不断变化并可以确保顺畅稳定运动的控制组件。舵机接受一个简单的控制指令就可以自动转动到一个精确的角度,所以非常适合在微机电系统、自动控制系统和航模中作为基本的输出执行组件。因舵机马达与目前市面上所使用的马达,如交流感应马达、直流有刷与无刷马达相比之下,具有相当的优势。因此引起了国内、外学者与厂商的注意。目前有不少关于舵机马达的研究与应用产品问世。
在台湾,机器人、遥控载具和遥测系统在产界已发展多年,在研发方面更趋于成熟,却有大部分还在使用普通舵机马达,其应用产品也在萌芽阶段。对于控制应用,为求更优于传统手动控制,因此投入于自动控制舵机领域,进而达成高效能、低价位、高精准,且能以最快速度自动调整来灵活应变各种环境。这项作品不仅仅想推动一个新的应用概念,更思考如何改变手动控制的环境限制,来达成一个舵机马达新的里程碑。
创作目的
未来不管大型或小型的机械工具都会走向高精密跟高精准的方向。在各方面的器械驱动应用,更应该以自动化和高效率的原则下,去做开发和应用。鉴于传统马达手动控制,数字舵机马达能更有效率针对环境自动迅速做出调整,再用主控芯片搭配演篹法连接计算机终端,提高的精准度、效能和经济价值是传统马达所做不到的。
本创意产品的主要特色是以HT66FU50作为系统控制与人机接口的主要核心,并配合HT66FM2240控制并判断马达的角度和转速,并回馈给主控端。沟通方面由I2C与UART接口作为计算机端与马达控制端的桥梁去作传输与接收。控制马达的转速和角度非常困难。经由位置环跟电流环闭回路设计,来监控目前马达负载与位置改变参数是属于各实验室的知识产权,而马达开发平台控制系统就是一整个系统的指挥官。
本产品提出一个通用型的舵机马达驱动控制器开发平台的制作方法,未来可根据不同的应用场合,调整控制参数,使舵机马达系统可满足各种负载环境的需求。
本产品将开发以舵机马达做为新一代的动力控制核心的产品。相较于感应马达与串激马达,新的数字舵机马达除了消除电刷与转换器的摩擦耗损之外,尚能针对节能减碳、精准控制、快速反应和降低成本做出贡献。
数字舵机马达还有优异的几项特性:
1.体机轻巧,易于安装。
2.输出力矩大,稳定性极佳。
3.控制简单,便于和数字系统配合应用,让马达转速与负载能力能满足各种应用领域的要求。 4.低价位,创造市场经济价值。
工作原理
本套数字舵机平台,结合了HT66FU50和HT66FM2240两芯片的功能。使用HT66FU50内建UART模块来连接计算机作沟通,同时当主控端,藉由I2C作讯号和数据传输针对HT66FM2240内P.I.D算法参数作调整,透过H-Bridge电路去驱动马达模块,控制舵机马达运转角度。
由上可知,舵机马达在控制与调整的过程中,总是消耗大量的时间成本,因此需要一套完善的舵机开发平台系统。
本产品共分为四大模块,下列为本产品的模块:
1.人机接口模块。
2.UART模块。
3.I2C串行接口模块。
4.马达驱动模块。
这些模块加上 I/O 的应用和软件整合开发正是HT66家族的强项,极适合用来做数字舵机平台开发。下列为各个模块的介绍。
人机接口
本产品采用计算机接口显示、按键与卷轴来组成一套完善的人机接口,透过C#软件充沛的 软件资源,能使接口更加精美,用户在使用上更加便利,能使舵机之调制过程,大幅降低时间成本的消耗。
此套人机接口包含有马达参数区、RS232信道数值设定与马达控制区,三个简约且清楚的接口,让用户可以轻易地上手,用户也可从接口上得到相对应的讯息去做立即的控制与调整,提升工作效率。
UART模块
UART模块之设计是使用HT66FU50芯片内部配备之UART模块来实现。
透过UART模块之TX、RX脚位配合MAX3232外围电路做设计,来与个人计算机做沟通,达到数据数据之传输与控制,并调整舵机马达驱动模块内P.I.D算法之参数。如此便能有效地调制马达的运作。
USART译码是用扫描BUFFER的方式。BUFFER总共有30组,一组有10字节(10 Bytes),共300 Bytes,各组数据里的最高位为有效位是和数据种类位作逻辑运算,当有扫描到有效数据时,程序会先将有效位去除,再根据数据种类做数据处理。
以下为每个Bytes所代表的数据种类:
当收到开头码为0X7A 、0X01~0X04时,代表此时计算机端将执行各个模式之选择,选择模式共分为舵机调适模式、固定角度模式、角度微调模式与雨刷模式四大模式,在测试方法会详细介绍各个模式之功能。
当接收到开头码为0X5A、0X01时,表示计算机端要求读取当下数字舵机马达之参数值,如位置角度参数、电流损耗参数..等。
接收到开头码为0X5A、0X02时,为计算机端要求进行数字舵机之调适,透过传输接口来调整目前马达驱动芯片内的P.I.D演算式参数。
I2C串行接口模块
I2C模块为HT66FU50人机核心与HT66FM2240马达驱动核心之沟通桥梁。
此模块是透过SAD、SCL两条信号线的控制来达到数据传输之目的。I2C模块数据传输方式是以串行方式进行,连接于I2C模块上的装置分为「Master」与「Slave」两大类,Master端是指发号施令的装置,而Slave端就是听令者,根据Master的命令完成数据的传输动作。
在本套产品中由HT66FU50做为Master端,HT66FM2240则为Slave端,如此就能将HT66FM2240所侦测到之马达参数传送至HT66FU50,在透过UART模块传至人机接口做显示,用户便能在计算机上清楚知道目前马达之参数。
MCU核心功能
本组采用HT66FU50作为核心MCU,再搭配HT66FM2240作为马达驱动,基于其高效能、低功率的特性。
HT66FU50 芯片
在本套产品内HT66FU50芯片为人机接口核心芯片透过内建的UART模块来与个人计算机、人机接口做连接,并显示参数值,其内建的UART模块来做数据处理与译码的动作,RS232协议的部分作为与个人计算机的数据传输与沟通。
以 I/O 脚位来输出PWM,提供舵机马达驱动模块作比较。用I2C串行接口模块与马达驱动模块作连接,藉此来改变内部之P.I.D演算是参数。
HT66FM2240 芯片
HT66FM2240芯片是本产品最主要核心部分,其工作内容为驱动数字舵机马达,透过芯片的高效率运算,配合位置环、电流环闭回路,将接收到的讯号回传至芯片,做数学运算来校正 H-Bridge之PWM输出,以此来达到高精准的马达驱动。
透过I2C串行接口模块与人机接口系统芯片作沟通,来根据用户设定,改变P.I.D演算式参数。
产品结构
本产品结构主要就软、硬件两大部份分别讨论。本部份主要阐明HT66FU50与HT66FM2240芯片在电路中与各大系统的相互关系,与其I/O接脚配置以描述硬件架构。再透过系统流程图与程序算法,藉此说明系统之软件设计概念。
硬件结构
本系统采用HT66FU50与HT66FM2240两种芯片来当作本产品主要控制芯片;分配本系统所需进行工作,各司其职,以此来完成快速、高精准度之数字舵机开发平台。
硬件架构图分为两个区块,左半边是主控区,右半边是马达驱动区。图一为本产品之系统架构图。
主控区:
主控区是以HT66FU50做为主控核心,透过芯片内部的模块与 I/O 脚位,与个人计算机做沟通。沟通接口使用的是HT66FU50内建的UART模块与计算机做沟通,以RS232协议与个人计算机做数据传输。
个人计算机上所使用的接口是本组为此套作品量身制作的软件接口,操作简单且直觉式操作,如此设计能使本产品更加人性化,增加市场竞争力。
马达驱动区:
马达驱动区采用HT66FM2240芯片来做设计,本产品在芯片设计时导入P.I.D演算式,透过位置环、电流环闭回路之设计,将读取到的数值做运算与外部PWM Command做比较,以此来校正H-Bridge之PWM输出,来达到快速、高精准度之马达驱动。
HT66FM2240 是一块高性能、低价位的芯片,使用在舵机马达的驱动,更凸显出芯片的效能,也能大幅降低产品的成本。
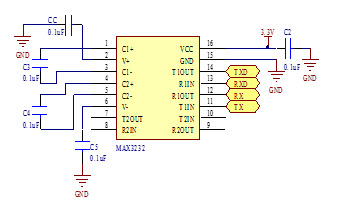
UART模块电路:
UART模块电路是使用HT66FU50内建的模块,透过软件之设定与两只I/O脚位(TX、RX),配合MAX3232外围电路[4]来实现HT66FU50与个人计算机数据传输之功能。图二为UART模块电路之电路图。
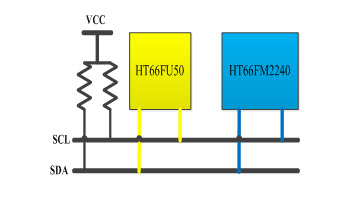
I2C模块电路:
模块电路是配置于HT66Fx0系列中SIM模块I2C接口架构,其数据串行传输是经由SCL(Serial Clock)与SDA(Serial Data)两条信号线众完成;这两只脚位为NMOS「漏极开路(Open Drain)」的结构,在使用上必须分别接上提升电阻。图三为I2C模块电路之示意图。
电流环闭回路电路:
电流环闭回路电路设计概念,是针对数字舵机马达的电流损耗来做侦测,在H-Bridge电路输出端接上不同数值电阻,透过电压、电流与电阻值间的关系,来侦测舵机马达在有负载时,所损耗之电流量,将数值回传至马达驱动芯片,做P.I.D运算,来调制马达。图四为电流环闭回路电路图。
软件系统
本产品软件系统部分,分为HT66FU50人机接口系统芯片与HT66FM2240数字舵机马达驱动芯片两个主要MCU来作说明。
HT66FU50 人机接口系统芯片
HT66FU50主要软件流程分为UART、I2C与PWM三大部分[5],下列根据此三大部分详细说明:
UART软件流程
UART软件设计采用HT66FU50内新增的UART模块来作实现,透过程序设计来设定UART波特率与传输模式。
程序开始会先初始化UART所有功能设定,当MCU收到计算机传输来的数据时,进入UART中断向量,在中断内判断是否为有效数据,为有效数据时,回到主程序作相对应的程序,否则跳出中断,执行其他程序段,并持续等待下一笔数据输入。图五为UART软件流程图。
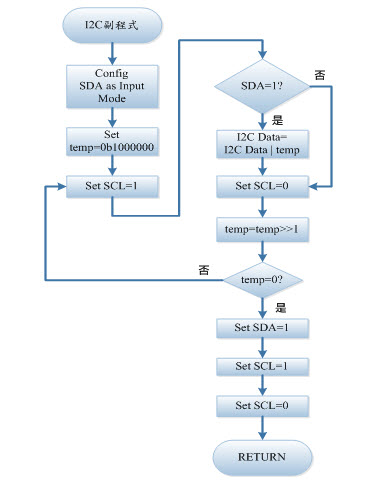
I2C软件流程
由于HT66FU50之I2C模块只能限用Slave功能,所以本产品在设计上使用I/O仿真I2C功能来实现。
此流程主要在主程序内执行,透过诸多子程序架构来完成,当程序呼叫Receve_data()子程序时,便会进入数据读取,因采用I/O仿真的方式,所以在时间上的设定非常重要。图六为I2C软件流程图。
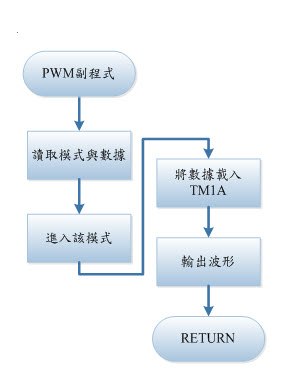
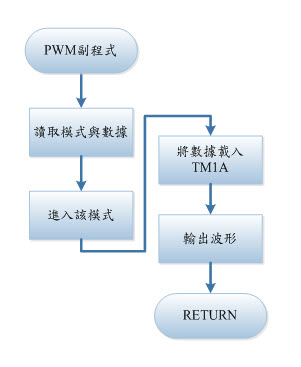
PWM软件流程
PWM软件流程主要功能是用HT66FU50内建ETM单元输出PWM波形。
根据计算机接口要求之模式与数值,透过UART传输至HT66FU50作判断,将数值加载TM1A缓存器内,来设定PWM占空比,使其输出600us~2400us之PWM占空比。此PWM为提供马达驱动芯片比要使用。图七为PWM软件流程图。
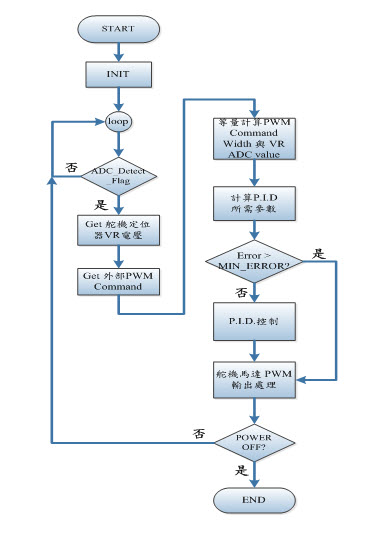
HT66FM2240马达驱动软件流程
数字舵机马达驱动芯片软件部分,主要读取外部PWM Command与舵机马达位置数值作比较判断,透过位置环、电流环闭回路所读取到的A/D值,用P.I.D运算使舵机马达能精准快速地达到用户要求之角度。图八为马达驱动软件流程。
测试方法
本产品为一舵机马达开发平台,为配合特定厂商与用户使用。在测试的部分,分为两部分,第一部分为计算机接口与MCU连接测试与控制,第二部分为舵机马达P.I.D调适测试。下列即为本设备重要功能之测试报告。
UART模块沟通测试
首先要让我们使用UART模块与计算机连接,若画面显示ok代表已成功连接。由画面可以看见连接后正在初始化中,Loading Line还没跑完。若信道初始化OK可以看见Loading Line已经跑完。同时会显示初始化OK。
UART连接成功后,用户便能开始选择模式,本产品接口提供四种模式选择,分别为固定角度模式、舵机调适模式、角度微调模式与雨刷模式。
固定角度模式
在马达控制区模式选择后,马达参数区会立即显示目前模式,在RS232参数设定可以得知Port脚位与波特率在此模式下的参数。固定角度模式的第二阶段测试,马达角度选择正45度,在未进入调适模式,马达经测定是在40度,误差值为负5度,电流耗损量为143mA。
舵机调适模式
透过调制的过程,经由人机接口里将我们所需要的参数值传输至马达做P.I.D调制,经由这个测试我们可以使马达立即转到我们设定的角度。进入模式后可以细微的调整我们所需要的角度,由负45到正45度。我们将其设定为负30度之后,可以由图十二得知马达是否转到我们调制的角度。
雨刷模式:
这个模式是为了测试当马达有负载时,是否会导致马达角度有偏转的情况发生。藉由仿真雨刷来做测试,会分别由负45度至0度,再到正45度做一个循环。
马达调适测试:
马达调适测试过程,是利用示波器与量角仪器来作测试。分别为舵机在正45度、0度与负45度时,所量取的角度位置图。如此便能清楚得知,舵机马达在角度的控制,是完全精准的。
上述到的雨刷模式,主要测试当舵机上有负载时,所耗损的电流量与位置角度之波形,分别为负载为0g、500g与1000g下,测得的电流损耗量与位置角度波形。
结论与讨论
经由一系列的测试与实验结果,一套以「高效能」、「低价位」与「人性化」为特点的数字舵机开发已成功被开发。透过HT66FU50与HT66FM2240的丰沛硬件资源及使用弹性搭配各种模块的精巧控制实际完成了一个非常完善的低价位高功能数字舵机开发平台。实际体验后,感觉十分满意,是一个成功的产品。
因为作品开发的时间不够,在P.I.D的调制上还有些美中不足,在未来用户可透过本开发平台,依各自产品与规格所需作参数之调整。此项产品将会对数字舵机市场掀起一场革命性的改变,经济效益无可限量。
(作者汪启茂为义守大学电子工程学系教授,郑任皓、李伟纶、陈凯晖、周政滔为义守大学电子工程学系学生)