为了因应更高速、高效能的晶片技术,半导体制程的线宽技术不断演进到奈米等级,因此必须提供单位时间内更大量的产出与较短的生产周期。在半导体后端制程中,将多个制程整合成为单一机台,简化制程产线的机台种类以大幅缩短制程的周期。在有限的空间内,机台的体积并未因整合的特性而被允许增加,所以控制系统的配置是一个必须考量的重点,透过EtherCAT分散式控制系统,高性能、低成本、应用简易、拓扑灵活的工业乙太网技术等优点,缩短现场布线的时间并简化其配线方式以利后续的维护工作。
EtherCAT工业控制自动化乙太网路技术
EtherCAT (Ethernet for Control Automation technology)-乙太网路控制自动化技术基于乙太网路通讯协议。此技术突破了过去其他乙太网路解决方案的系统限制,具有灵活的拓扑结构,简单的系统配置,性能优越、操作简便以及成本低廉等特点,因而使得过去无法选择使用现场汇流排网路技术的应用领域得以实现采用此项技术,EtherCAT目前已广泛运用于机械设计、运动控制等各式自动化与工业领域用途的场合。EtherCAT技术于2005年2月正式成为IEC规范—IEC/PAS 62407,并整合至国际现场汇流排技术的新一代标准IEC61158 中,国际标准组织 (ISO)亦已将EtherCAT纳入ISO15745标准。
EtherCAT系统架构与运作原理
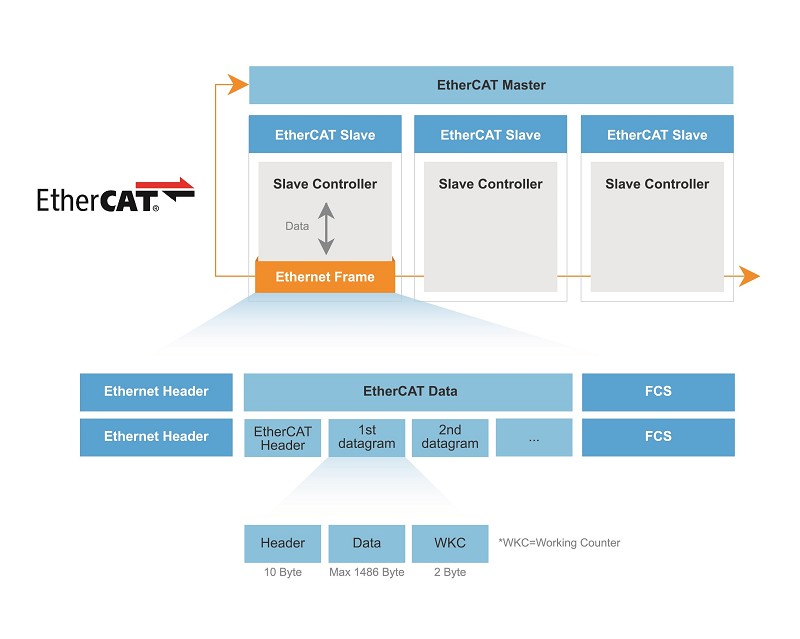
EtherCAT为一种实时(Real-time)工业乙太网技术,采Master与Slave架构,Master发送乙太网路封包给各个Slave,Slave从封包中取出相对应的数据并把所需更新的资料与数据插入封包内,而无须接收整个乙太网资料封包,在访问到整个系统最后一个Slave时,封包会在此回转,经由最后一个Slave将处理过的封包传至Master端,整个过程中封包的读取与写入作业只有几奈秒的时间延迟。
EtherCAT拓朴结构
EtherCAT Slave的数据处理机制允许在EtherCAT网段内的任一位置使用分支结构,所以EtherCAT几乎支援所有的网路拓朴,如线型、星型、树状结构或是菊花链(Daisy Chain)的拓朴架构,如图2所示。
由于使用100BASE-TX的乙太网物理层,二个设备之间的距离可以到100公尺,一个EtherCAT区段的网路最多可以有65535个设备。若EtherCAT网路是使用环状拓扑(主站设备需要有二个通讯埠),则此网路还有缆线冗余的机能。
EtherCAT分布时钟
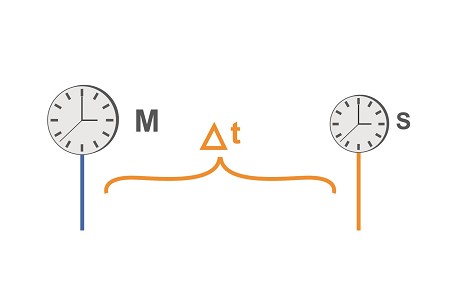
在运动控制中,多轴同步与IO同步对整个控制系统尤其重要,在分散式控制系统当中更为重要,以EtherCAT通讯架构来说,封包经由Master传递至Slave之间的过程,封包每经过一个Slave就会有延迟的效应,最后的Slave可能已经有了微秒等级的延迟。因此EtherCAT透过 IEEE 1588[13]标准的分散式时脉实现同步,与完全同步通讯中通讯出现故障会立刻影响同步品质的情况相比,分布排列的时钟对于通讯系统中可能存在的相关故障延迟具有极好的容错性。
Master连接的第一个具有分布时钟(Distributed Clocks)功能的Slave作为参考时钟(Reference clock),以此Slave的时钟作为同步其他Slave的基准,并由主机控制器更新其他从端设备时脉,藉由Master端计算其参考时脉与每个从端设备时脉的时间差,将可得出个别从端设备系统时脉的偏移补偿量(Offset Compensation),依此来达到从端设备的时脉同步化,并提供所有Slave设备绝对的系统时间与一致同步性。
采用EtherCAT,资料交换就完全基于纯硬体机制。由于通讯采用了逻辑环结构 (借助于全双工快速乙太网的实体层),主站时钟可以简单、精确地确定各个从站时钟传播的延迟偏移,反之亦然。分布时钟均基于该值进行调整,即使通讯循环周期有抖动,时钟的抖动远小于1μs,大约接近IEEE 1588精密时间协议的标准。因此EtherCAT的主站设备不需针对时钟使用特殊的硬体,可以用软体实现在任何标准的的乙太网MAC,即使没有特殊的通讯协处理器也没有关系。
EtherCAT性能与优点
EtherCAT 拥有杰出的通讯性能,接线非常简单,并对其它协议开放。 EtherCAT在30 μs内可以更新1000个I/O资料,相当于在100Mbit/s的乙太网传输125个位元组的资料。读写一百个伺服轴的系统可以以10 kHz的速率更新,一般的更新速率约为1–30 kHz。可选择双绞线或光纤,并可以用简单的线型拓扑结构替代昂贵的星型乙太网拓扑结构,无需昂贵的基础组件。 EtherCAT还可以使用传统的交换机连接方式,以整合其他的乙太网设备。其它的即时乙太网方案需要与控制器进行特殊连接,从站的微处理器不需处理乙太网的封包。所有程序资料都是由从站控制器的硬体来处理,EtherCAT只需要价格低廉的标准乙太网卡(NIC) 便可实现。
应用EtherCAT技术于半导体IC包装设备
在半导体后端制程中,将多个制程整合成为单一机台,简化制程产线的机台种类,亦可以大幅提升制程的周期缩短。相较于过去,机台的组成为个别特定功能的机械设备,为了因应整合与高速生产的需求,必须将多个特定功能的机器以及多站完成的工作,整合为单一机台来实现。
此时,整合机台的机构复杂度相对提升,对于机台内的运动轴数也因整合了多制程于单一设备而相对增加许多。此应用案例说明如何将EtherCAT多轴同步的运动控制应用于半导体IC包装设备,同时达到高产能、高精度以及后续简易维护等需求。
系统需求
因多个特定功能与制程以及多站完成的工作,整合为单一机台来实现,机构复杂度也相对提升,对于机台内的运动控制轴数也会相对的增加许多。此专案的系统需求如下:
1.轴控的数目需达31轴,其中包含步进与伺服马达。
2.高精度龙门运动控制
3.在有限的空间内,机台的体积并未因整合的特性而被允许增加,所以控制器的配线是一个必须考量的重点,不仅会影响现场布线的时间与成本,更会影响后续的维护工作。
4.需高达数百点DI/DO控制
5.在检测部分,需要引入视觉检测,必须搭配轴控的位置比对与触发信号功能,以作为精准的高速连续(on-the-fly)取像。
IC包装设备系统架构
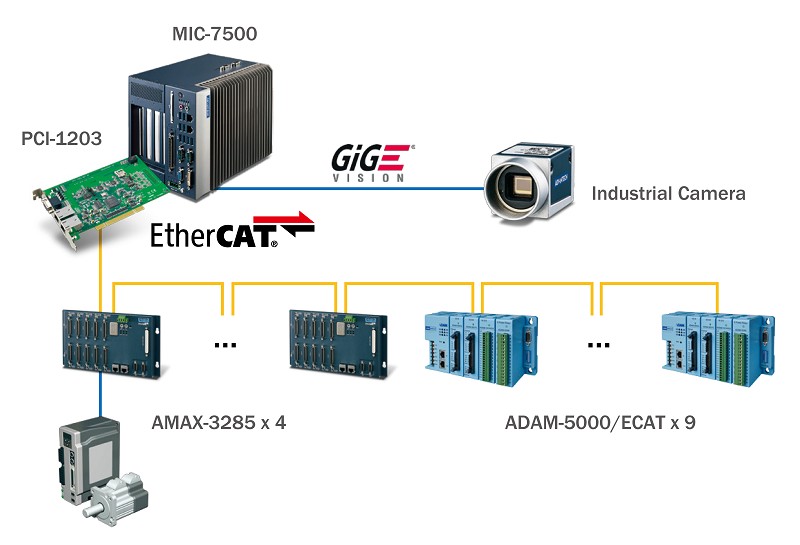
此设备采用研华EtherCAT解决方案,架构如图6所示:
项目 |
说明 |
PCIE-1203 |
EtherCAT主站控制卡 |
AMAX-3285IO |
EtherCAT 脉冲模组 |
ADAM-5000/ECAT |
EtherCAT分散式高速I/O从站 |
QCAM-G1600-060CE |
GigE介面工业相机 |
MIC-7500 |
高效能工业电脑平台 |
设备系统说明
PCIE-1203是一个2埠EtherCAT PCI主站控制卡,具备SoftMotion运动核心,适用于所有PC-Based的工业自动化平台,EtherCAT通讯及封包处理皆在PCIE-1203上自主执行与处理,可同时执行Motion与I/O应用程式。对于EtherCAT运动主站,连接31轴伺服与步进马达和高速I/O模组的通信周期不超过500μs,高速I/O主站的周期时间不超过200μs,实时与高精度控制为EtherCAT主站之特点。
Slave模组包含AMAX-3285与ADAM-5000/ECAT。 AMAX-3285是一个8轴EtherCAT转脉冲运动模组,适用于所有脉冲型之驱动器并提供CW/CCW和脉冲/方向接口,无须购买昂贵的EtheCAT专用型马达。 ADAM-5000 / ECAT为4插槽分布式灵活系统,可为EtherCAT提供高速、高精度Remote I/O,从基本DI/O到高速AI/O均支援。
效益与改善成效
1.EtherCAT分散式控制系统,只需一张主站卡即可同步控制31轴与巨量高速I/O,对比过去集中式系统,除了成本大幅降低且有精简配线与后续维护方便且轻松等优点。
2.SoftMotion软体核心满足IC包装检测方案,提供多样化的运动模组功能,如位置比较触发实现精准且高速连续取像;针对IC包装机的龙门(Gantry)架构,龙门差值补偿功能解决机构本身的物理误差,将龙门两轴位置差值缩减50%达到高精度龙门运动控制,进而提升20%产能。
(本文作者谢淳巨任职于研华Intelligent motion control部门)
参考文献
[1]研华,应用EtherCAT解决方案提升整合式IC包装机机台效能,http://www.advantech.tw/success-stories/article/257064e5-9280-4dbc-ba8b-65a2b4465a16,2017/04/20.
[2]研华,应用EtherCAT解决方案提升LED分选机机台效能, http://www.advantech.tw/success-stories/article/b6b41e49-f651-4308-86f5-f2ebe579f45,2017/04/20.
[3]EtherCAT技术协会,EtherCAT Technology Group(ETG), http://www.ethercat.org.
[4]EtherCAT Introduction, http://www.ethercat.org.
[5]EtherCAT Communication Specification, http://www.ethercat.org.
[6]汪曙峰、吴承学,串列式数位伺服运动控制及工业控制自动化乙太网路技术简介,工业技术研究院机械所。
[7]郁极、刘艳强,工业乙太网现场总线EtherCAT 驱动程式设计及应用,北京航空航天大学出版社”,2009年8月。