全球定位系統(Global Positioning System)是一套由美國國防部(Air Force)建構的衛星定位系統,其基本原理乃是利用繞著地球的24顆衛星所發射的信號,再加以幾何上的計算,來得到接收者的笛卡爾座標(Cartesian Coordinate)。另一個與此相當的系統是由前蘇聯所建構之定位系統(Global Navigation Satellite System,GLONASS),基本上,此系統也是由24顆衛星所組成,這24顆衛星分別分佈在3個軌道面,每一個軌道面又分別由8顆衛星以相差45度(Latitude)均勻分佈,此軌道面之高度約為19100Km,衛星運行一周需費11小時又15分鐘,因為本文主要是介紹美國所建構之定位系統(Navstar GPS),所以有關GLONASS的部份就不多敘述。
GPS簡介
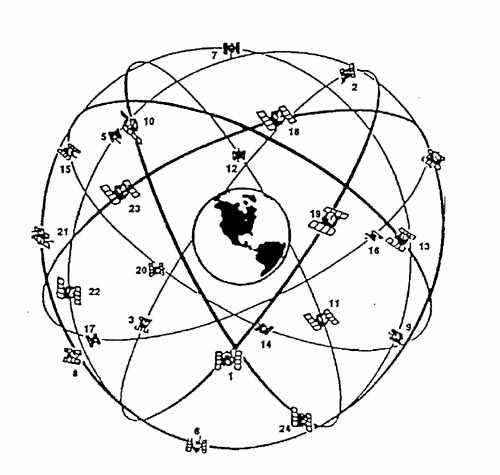
簡單地說,全球定位系統是一個以空間為基準,利用無線電波與時間差來測量距離的一個系統,它能夠提供精準的位置資料、速度、以及時間。整個系統可以被區分為三大部分,我們稱之為Space Segment、Control Segment和User Segment。第一個Space Segment,主要就是由24顆衛星運行於半同步軌道,所謂半同步軌道指的就是衛星運行一周需費大約12小時(11小時又58分鐘)所以在一天之中,同一顆衛星剛好出現在一個固定不動的使用者的頭頂上一次(23小時又56分鐘),這24顆衛星以每個軌道4顆衛星均勻的分佈在6個軌道面上,每個軌道面都與赤道相差55度的傾斜角,而這些衛星所在的軌道高度平均約為20200Km,(圖一)為衛星軌道分佈圖。
這24顆衛星所發射出來的測距信號有兩個頻道(D-Band),其一稱之為L1,發射頻率為1575.42MHz ;其二為L2,發射頻率為1227.6MHz。這兩個為載波頻率負責將展頻信號以高頻載波來傳送,GPS所使用的展頻通訊(Spread-Spectrum)技術,將會在下面中詳加介紹。展頻所調變的測距碼(Ranging Codes)又可分成兩種,一為1.023MHz的C/A碼(Coarse/Acquisition Codes),顧名思義,依據這個碼所得到的精確度較為粗略,而且C/A碼也只用L1來調變,專門開放給一般商業用途的使用者。另外一個測距碼是10.23MHz的P碼(Precision Codes),這個碼同時調變在L1及L2載波上,由於P碼的Chip較短,因此能夠得到較精準的定位。
基本上,這兩種測距碼都能夠被用來量測衛星與接收者之間的距離,然而通常P Code還會被加密而且也只開放給被授權的使用者,所以P Code通常也只應用在軍事用途的定位系統上,也因為有這樣不同的兩組碼,全球定位系統又被區分成所謂標準定位服務(Standard Positioning Service,SPS),以及精確定位服務(Precise Positioning Service,PPS),其中標準定位服務就是只使用C/A碼在L1載波上,而精確定位服務除了使用C/A碼在L1載波上,也再加上P Code於L1和L2兩個載波,除了這些測距碼之外,最後也是最重要的就是一個50Hz的資料信息碼。這個碼載有的資料包括了衛星時序資料、衛星精確軌道資料(Ephemeris),此資料只含有發射訊號的衛星本身的軌道資料、衛星基本軌道資料(Almanac Data),此資料含有所有衛星的基本軌道資料及信號傳播於電離層的修正資料。
接下來介紹Control Segment,這主要是由各個位在不同地點的地面控制站台所組成。其主控制站台(Master Control Station,MCS)位於美國科羅拉多州,其餘幾個站台則均勻沿著赤道分佈。這些地面控制站的主要任務就是監測及控管這些在太空中運行的衛星,其功能包括有衛星軌道控管、衛星軌道資料更新、衛星本體之維護等。這個系統之運作流程是由各個子站台分別接收它們所鎖定的衛星的軌道資料,然後透過美國的防衛衛星通訊系統將資料傳送到主控制站台進行軌道資料的估計及再預測,然後再將新的軌道資料地面天線站上載至各個衛星。最後一個部分User Segment,才是跟一般使用大眾有密切關係。所謂User Segment,其實指的就是GPS接收器,其功能不外乎就是射頻接收、解碼以及處理衛星的軌道資料,進而計算出接收器的位置。
GPS採用之通訊技術
接收器之位置計算原理,基本上是由衛星所播送下來的測距碼,經由GPS接收器量測到其衛星訊號的發射時間,再與接收器上的接收時間一比對,即可利用時間差及傳送速度計算出衛星與接收器之間的距離。而50Hz的資料信息碼,更進一步提供了接收器接收到衛星訊號當時的衛星位置,再利用這些資料所成立的聯立方程式,求出接收器的座標軸位置,並校正接收器上時序的偏差量。一個3D的位置解,需要有最少4個衛星的資料被鎖定。
要清楚了解GPS整個的通訊技術原理,就必須從衛星播送的測距碼C/A Code開始介紹。C/A碼是由1023個擬亂碼(Pseudo-random Code),以時脈速率1.023MHz所組成,所以一組C/A碼Frame(1023 bits)將會以每1ms的時間一直重覆,這樣短的C/A碼設計是為了能讓接收器在較短的時間內追蹤到衛星訊號,每一個衛星都有它自己一組固定的C/A碼以資辨認,這些C/A碼都是Gold Codes。P碼是一組時脈速率為10.23MHz的擬亂碼,由於P Codes只開放給軍事用途,所以在此我們也不多加以討論。
除了C/A碼之外,最重要的就是50Hz的衛星資料信息碼。在衛星上,這個信息碼將會與C/A碼做Convolution,再調變到L1的載波上,此信息碼包含的資料有發射此信息碼的衛星本身的精密軌道資料,也包含有其他衛星的基本軌道資料,除了這些之外,還有信息碼的發射時間、一個轉換字元(Hand Over Word,HOW)使用於C/A碼切換成P碼、時序校準資料、衛星本身及其他衛星的機件運作是否正常的資料、電離層傳播延遲參數及計算UTC的係數等。
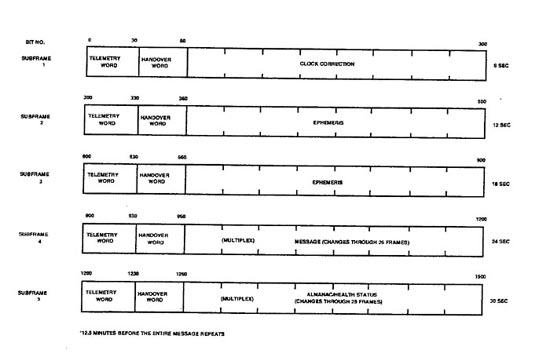
一個完整的資料信息碼是由25個資料框(Frame)所組成,而每一個資料框又各含有1,500位元,其中每個資料框又再被分割成5個子資料框,各分別有300個位元,(圖二)是一個完整資料框的圖示。以50Hz的資料傳輸速率來講,一個子資料框需要6秒,一個資料框需要30秒,而完整的25個資料框就需要12.5分鐘了。值得注意的一點是,在完整的一組25個資料框中,每一個資料框的前3個子資料框的資料是固定不變的。由於前3個子資料框的資料是所謂發射此信息碼的衛星本身的精密軌道資料(Ephemeris),以及時序校準資料等,這表示與此衛星本身相關的資料會每30秒鐘更新一次,而後2個子資料框的資料是其他衛星的基本軌道資料,由於這筆資料量較大,所以必須以25個資料框的時間才能全部傳完。
了解C/A碼及信息碼後,我們再將這兩個碼做Convolution,在這裡也等於做展頻的動作,因為信息碼的頻寬小(50Hz)而C/A碼的頻寬則較大(1.023MHz),所以等於是把信息碼的頻寬擴展大了,接著再以BPSK的調變模式(當位元從邏輯0變到1或由1變到0時載波的相位必須變化180度)將訊號載到L1的頻率。
前述所提到的都是屬於衛星發射端的信號,而在接收器端做的工作流程是,找尋C/A碼並鎖定之、C/A碼補獲、載波補獲、信息碼位元同步、資料框位元組同步、搜尋並辨認其他未鎖定之衛星、計算與各衛星間之距離(Pseudorange)、解聯立方程式得位置。
典型的衛星追蹤方式會先由接收器來決定現在有哪幾號衛星在接收器的天空,然後接收器會鎖定某一個衛星來進行辨認(Acquisition)的過程,當然,之所以能夠決定有哪幾號衛星在接收器的天空,是取決於儲存在接收器內的衛星軌道資料及接收器的時間和位置。在接收器的規格裡把這樣的開機方式稱為暖開機或熱開機。相對地,當接收器裡什麼資料都沒有時的開機方式,就稱為冷開機。這時候接收器的軟體就要規劃一個較有系統的方法來搜尋衛星,一旦有一顆衛星被鎖定後,接收器就可以利用所解讀到的信息碼而得知有哪幾號衛星在接收器的天空上。
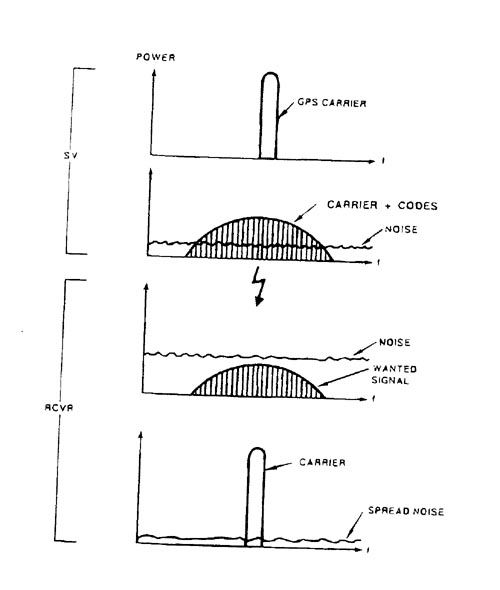
一般而言,在地面上接收到的衛星信號強度已經比接收器本身的熱雜訊還低。這是因為展頻過以及較長的傳播距離所致,為了將衛星訊號從這些雜訊中截取出來,GPS採用了碼相關比對技術(Code Correlation),接收器本身會先產生一組碼來跟從衛星收到的訊號做比對,當兩組碼一樣時,相關值最大,這時解展頻後就可以得到原來的信號頻譜,其過程可以參考(圖三)。
GPS的導航效能
在討論GPS的導航效能之前,我們必須先介紹一名詞,選擇性干擾(Selective Availability,SA),由於當初在1970年代發展C/A碼來定位時,其定位的精確度可達20-30米左右,超出預期的好,因此美國國防部乃刻意加上干擾信號使其精確度變到以下要介紹的水準。
通常我們都是以四個參數來評比接收器的性能,這四個參數分別是位置的精確性、速度的精確性、時間的精確性以及定位時間(Time to First Fix,TTFF),通常可能還會再加上接收靈敏度等。在位置精確性的規格上,由美國國防部定義出的標準是95%的水平定位點必須落在半徑100米的圓內。這個標準是針對SPS而言,在正常的情況下(不包括SA效應)會有兩個因素影響位置的精確性,一個稱之為UERE(User Equivalent Range Error),這個誤差是所謂的擬距離(Pseudorange)誤差,並且是由每一個衛星所貢獻出來的,造成這個誤差的原因有衛星信號的隨機變化、傳播特性的變化等。長期而言,這個誤差量會接近高斯分布,並且每一個衛星的誤差量將會相等。另外一個誤差是所謂的GDOP (Geometric Dilution of Precision),這個誤差是一個立即反應的誤差量,而它的影響主要是因為鎖定到的衛星的幾何分布情況,當鎖定到的衛星分布越散(理論上,當兩個衛星的擬距離為直角相交時,為最佳化)則GDOP值越小,亦意謂誤差量越小。
接收器的速度是藉由量測載波的都卜勒頻移而得到的,其誤差的程度與接收環境有直接的關聯,在沒有SA的干擾下,其誤差在每一個分量上都必須小於0.2m/sec,即使在有SA的情況下也不能大於0.4m/sec。
由於GPS接收器所接收到衛星訊號包含有衛星上原子鐘的時基信號,因此它本身也就能夠輸出相當精準的時脈信號。一個從GPS晶片固定腳位輸出的時脈訊號,將會是最精準的。一般在鎖定4個衛星並且接收器靜止不動的情況下,以SPS而言,大約會有340 nanosecond的誤差,若再加上GPS接收器晶片(處理器誤差、傳播延遲等)本身誤差約60~100 nanosecond,則整個誤差將會接近500 nanosecond。
定位時間的量度,其實就是接收器從啟動開始到得到第一筆定位位置的時間,這其中依據接收器的不同狀態還可再分類有冷開機、暖開機以及熱開機。各個GPS製造廠家也都以此規格做為性能優劣的指標。所謂冷開機指的就是當接收機什麼資料都沒有的情形下,啟動後得到第一筆定位位置的時間。也就是說沒有日期、時間、初始位置、軌道資料(Ephemeris & Almanac)等。而相反地,熱開機是指當以上這些資料都存在的情況下,GPS處理器所計算下一個更新位置的時間。
接收機靈敏度是一個較不客觀的評比標準,因為各個廠家在列出這個規格時,通常都沒有將測試條件一併說明,即使測試條件有說明出來,各家的條件也一定不盡相同。即便如此也還是有基本法則可供參考,例如將一衛星訊號模擬器直接輸出一功率分配器(Power Divider),再分別接到兩個待比較的GPS接收器的射頻模組,先輸出較大的功率,以確使兩個GPS接收器都能鎖定到衛星,再逐漸衰減信號強度,以衛星信號之脫鎖來決定其靈敏度的優劣。
GPS供應商
目前提供GPS的廠家可大致區分為四類,第一類是只提供晶片(GPS Chipset)然後支援客戶研發終端產品(End Product)的廠家,如美商瑟孚、Phillip、IBM、A&D、ST等。第二類是只提供GPS模組的廠家,如Motorola、Rockwell和第一類供應商的客戶。第三類是指提供一般商用終端產品的廠家,這類的終端產品有汽車導航器、船用/飛機用/個人用導航器,其特點就是含有方便的導航軟體、友善的人機介面(如LCD、顯示器、Keypad),甚至再加上2-way Transceiver(在此汎指GSM,CDPD,Trunk Radio,WCDMA等),此類廠家如Garmin、Trimble、Magellen、台灣的長天、皇旗等。第四類廠家指的是生產高精確度的GPS接收器,也就是有得到P碼授權的業者,如Leica。
GPS的應用與遠景
GPS發展至今已經是第三代了,第一代的Navstar衛星稱為BlockI,有10顆衛星分布於三個軌道面,是從1978到1985年間發射上去。隨後在1989到1997年之間又發射了第二代衛星,稱為Block II/IIA,共有28顆Block II/IIA的衛星分佈在傾斜55度的6個軌道面上。事實上,BlockII/IIA也就是我們目前在接收其訊號的衛星,第三代的衛星增加了一項重要的功能,就是利用UHF來自動更新衛星的導航資料,如此一來衛星即可減少與地面站台之連結。而為了再進一步加強衛星的自動導航性能與其他功能的完整性,第四代的GPS衛星Block IIF,也正在被發展中,預計在2003年會發射升空。
隨著消費性電子產品的應用層面日廣,不少電子產品都在積極地規劃整合GPS的導航功能,最普遍的如電子地圖公司、汽車導航系統、行動電話、PDA等。一旦GPS的導航功能搭配上適當的電子地圖與規劃完善的導航軟體,則未來GPS將會成為人人必備的生活必需品。(本文作者為北科大兼任講師)