本文探讨可用於量测光电(electro-optic)感测器性能的不同扫描模式和方法。感测器解析度、失真、视野(FOV)大小、最小可解析对比度和最小可解析温度(在红外摄影机的情况下)的量测,都是通过这些性能指标测试的范例。
使用自动运动系统执行扫描测试可以得到许多感测器的性能数据,可用於开发和生产测试。建立生产线感测器适用规格,使用准确的系统自动进行pass/fail测试,同时比较基准及性能趋势,可用於发现品质与制造问题。 这些自动化测试甚至可以通过使用即时量测的光电图像数据来校正光学误差,从而提高感测器的一致性和准确性。
单点目标扫描
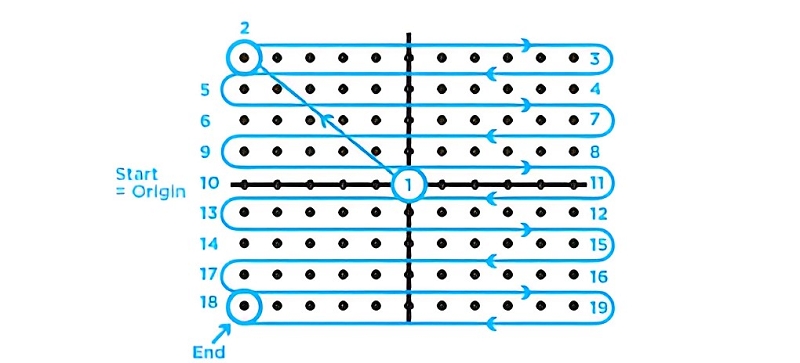
光电成像系统最简单、最有效的测试之一,为通过感测器视野(FOV)均匀移动高对比度目标,并在每个位置收集视觉位置与感测器图像数据。 该过程首先通过感测器 FOV 在既定的模式(通常是正方形、矩形、圆形或十字准线)上编程点对点步骤。在每个测试点,从光电感测器和视觉运动编码器位置同时捕获数据。阶梯图案可以是方形或矩形光栅扫描、角落扫描或以 FOV 为中心的均匀圆形扫描。
图一显示单向光栅扫描模式的范例。当需要最高精度时,此扫描模式通常用於执行光电感测器校准。 使用单向扫描方法消除了运动系统迟滞(hysteresis)和量测背隙(backlash)。这种扫描方法的一个缺点是校正和量测时间较长。
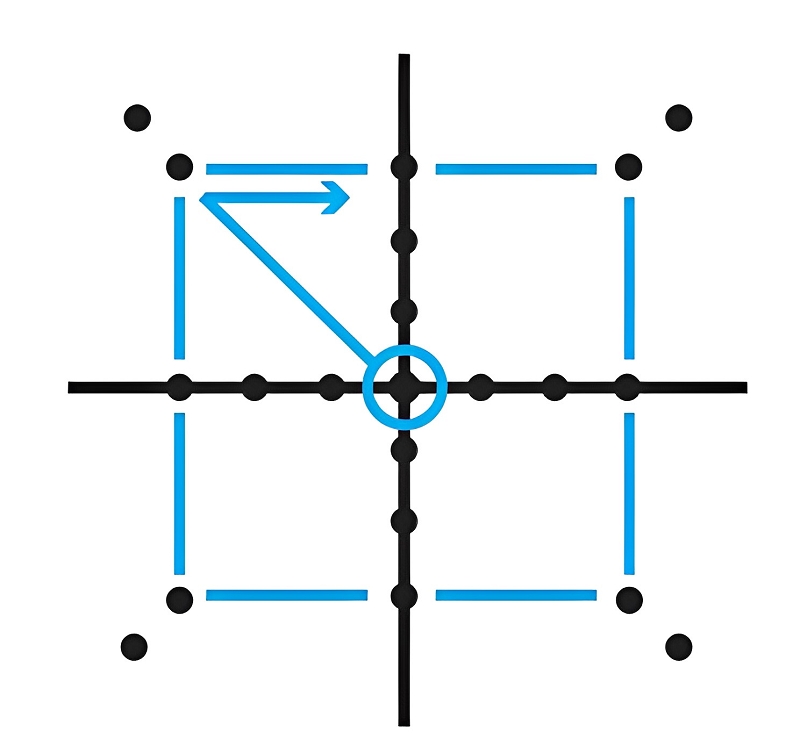
图二显示双向光栅扫描模式的示例。当产能为关键时,通常会使用这种扫描模式,因为测试时间会被最小化。此外,如果此用感测器的解析度低於运动系统迟滞和背隙,则此模式是一种很好的测试方法。这种方法的一个潜在缺点是运动系统的迟滞和背隙会降低整体精度。
图三显示包含角落量测的光栅扫描模式示例。这种扫描模式有利於快速定位图像中心,检查图像偏斜度并显示感测器与成像器光学对准的扭曲和对称性,这有助於识别组装错误。对於EO感测器安装在云台(gimbal)上的应用,此扫描模式可用於量测光电感测器与云台运动轴的正交性。在机械设置或软体中执行该对齐错误的校正。
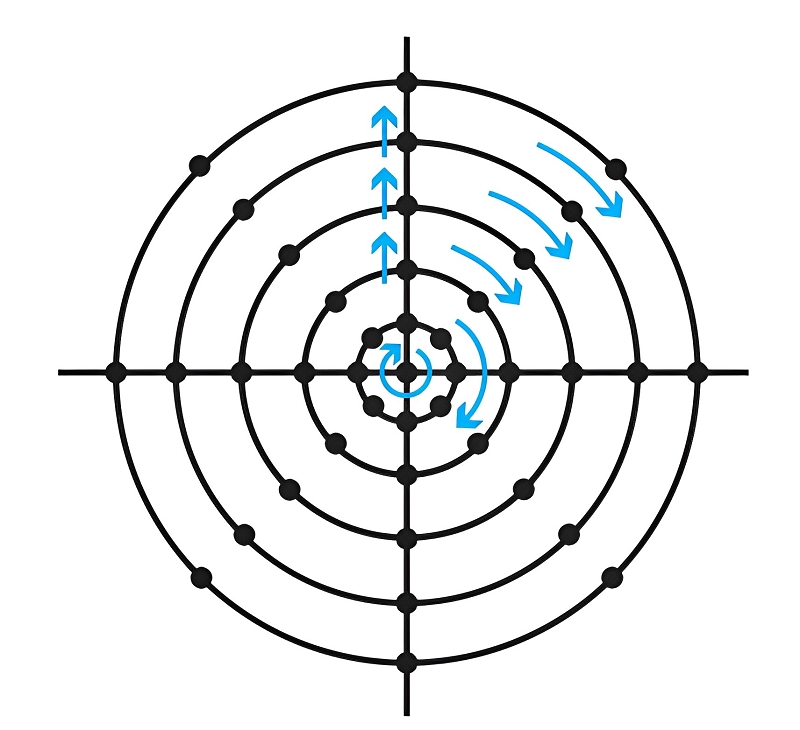
图四显示使用同心圆和 45。 增量量测点的圆形扫描示例。圆形扫描路径经常用於在初始组装期间量测光学??远镜的镜头对准。该测试通常在温控腔中重复进行,以确定对感测器在运行中所暴露的温度范围的对准灵敏度。
最後,这种扫描模式可用於雷射点功率分布量测,并有助於辨识由设计或制造问题引起的局部热点或功率空洞。紧密的螺旋扫描模式也可以获得类似於同心圆扫描的量测结果。
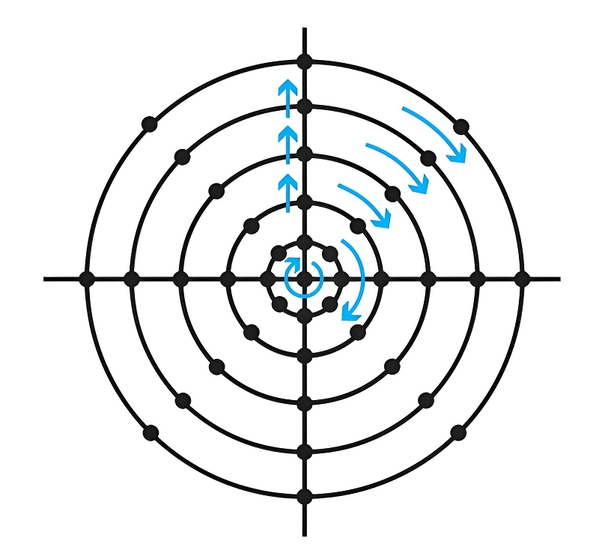
| 图四 : 具有同心圆和以 45。 增量定位的量测点的圆形扫描图案。 |
|
所有上述扫描模式都可用於量测镜头变形误差。在每个扫描模式开始时,运动系统将目标对准FOV 的中心,XY像素位置和运动编码器位置被设定为中心叁考点。整个扫描完成後,将运动编码器位置与被测单元(UUT)感测到的目标XY像素位置进行比较,以确定镜头变形误差。可以从该数据生成感测器校正表。然後通过编程的扫描模式重新运行运动系统,并在软体中加载校正文件,从而验证该错误是否存在。
解析度目标或阵列目标扫描
代替单点目标扫描,二维解析度目标或目标基准扫描阵列,用於在每个运动步骤覆盖更大的 FOV 区域。 这种方法通过在光电感测器中瞬时记录目标 XY 像素位置的二维阵列来增加单个运动步骤的图像目标量测位置,它还减少了整个 FOV 的运动步数。图五显示这种二维区域光栅扫描方法的示例。
这种方法的优点之一是减少了量测时间。然而,後处理稍微复杂一些,因为它需要拼接图像和组合数据。
先前在图一至图四中说明的相同扫描方法可以与这种重叠区域方法一起使用。该技术适用於校正非常大的 FOV 感测器,例如卫星成像器。这也是一种很好的扫描方法,可以使用安装在云台上具有窄 FOV 的高解析度感测器来量测大面积区域。通过在系统中添加图像处理,重叠扫描也可用於在云台的视野中定位新的或变化的物体。
动态感测器测试
感测器动态和图像处理性能可以通过在视野中以恒定或变化的速率移动物体来测试,测试对象通常是一个小的垂直条或薄板,它们会在均匀的背景和感测器之间通过,这种状况有时被称为「狭缝测试」。根据扫描频率、目标尺寸和扫描长度,可以使用各种运动装置,例如旋转和线性平台,可以通过增加运动速度,直到狭缝不再可见,用来测试感测器成像频宽和瞬时成像解析度。
可以使用之前显示的相同运动扫描配置文件,但不是在每个量测位置停止,而是使用UUT和运动系统之间的紧密同步时捕获数据。由於运动系统和感测器的动态特性,量测精度可能会略低。然而,主要优点是更快的测试时间和更高的产能。
动态测试的数据收集
确保量测数据与量测位置精确匹配在高解析度动态测试中可能具有挑战性,更快的扫描速率有利於更高的产能,但UUT数据与运动数据的紧密位置同步是必要的。
一些高阶运动控制器具有内置的低延迟触发功能,可用於实现这种紧密同步。Aerotech运动控制器包括一个以位置为基础的低延迟输出触发信号,称为「位置同步输出(PSO)」。 PSO允许用户指定三维空间中的向量距离以触发数据收集,可以根据命令距离或实际位置回??触发输出,进一步提高同步确实度。
使用PSO等内置控制器功能,无需购买昂贵的高速硬体数据采集系统或开发定制的数据采集软体。
总结
在本文中,讨论了各种运动扫描技术的优缺点,使用这些扫描技术及相关的测试设置和驱动技术,将使得光电测试工程师能够就有效的测试策略做出更明智的决策。
(本文作者Tom Markel为Aerotech航空太空策略客户经理)