目前在永磁馬達(PMSM或BLDCM)的控制上,馬達轉子位置回授主要有光學式增量型編碼器(Optical Incremental Encoder)、霍爾感測器(Hall Effect Sensor)、磁感應旋轉編碼器(Magnetic Rotary Encoder,以下簡稱MRE)及解角器(Resolver)等。至於要使用何種感測器,主要考量點包含成本、使用環境及輸出角度分辨率等因素決定。例如工業上精密加工應用,光學式編碼器的高精度輸出可以符合加工精度要求;如電動腳踏車(e-Bike)或電動滑板車等,因成本考量,霍爾感測器可符合需求,並提供一般消費者可接受的性能;若需要更好的騎乘體驗,在成本兼顧情況下,MRE是不錯的選擇。
除了上述傳統的感測器,Microchip 提供了另一個成本與性能兼顧的位置感測器:電感式位置感測器(Inductive Position Sensor,以下簡稱IPS)。根據作者目前所接觸到的應用實例,MRE 及 IPS具有相似性能與成本,但在安裝方式,MRE須將感應用之磁鐵安裝於軸心上,且該MRE 晶片必須正對該磁鐵。若馬達後方軸心突出馬達後蓋本體則無法安裝,IPS則不受此限,安裝位置彈性佳。IPS 詳見Microchip 官網(https://www.microchip.com/en-us/products/sensors-and-motor-drive/inductive-position-sensors)。
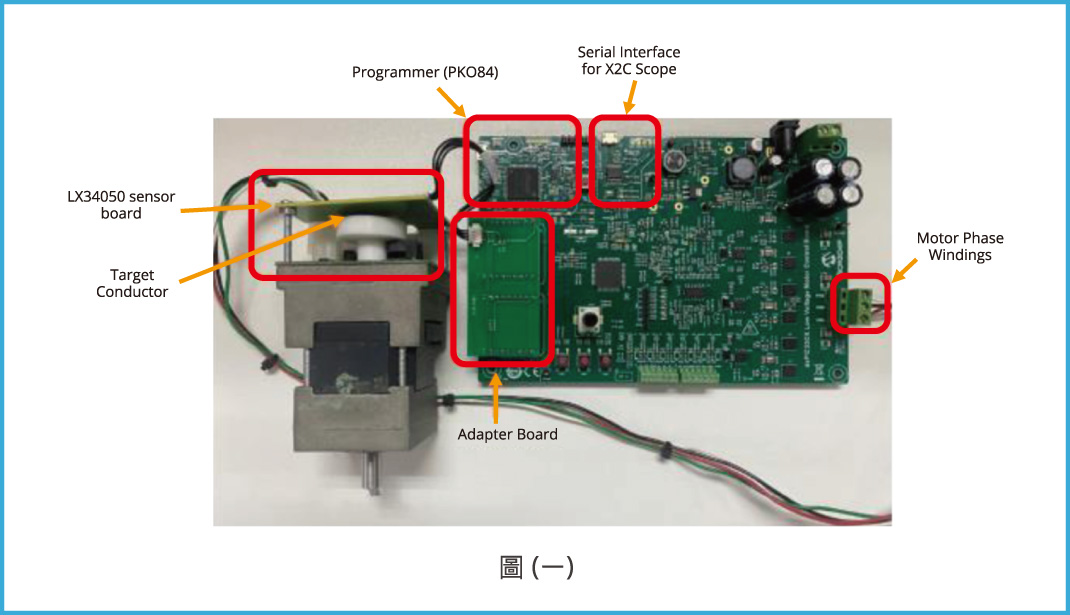
本次測試設備如圖(一)所示 (詳見AN4764),測試結果以MPLAB ® X 插件X2C Scope 擷取輸出波形。
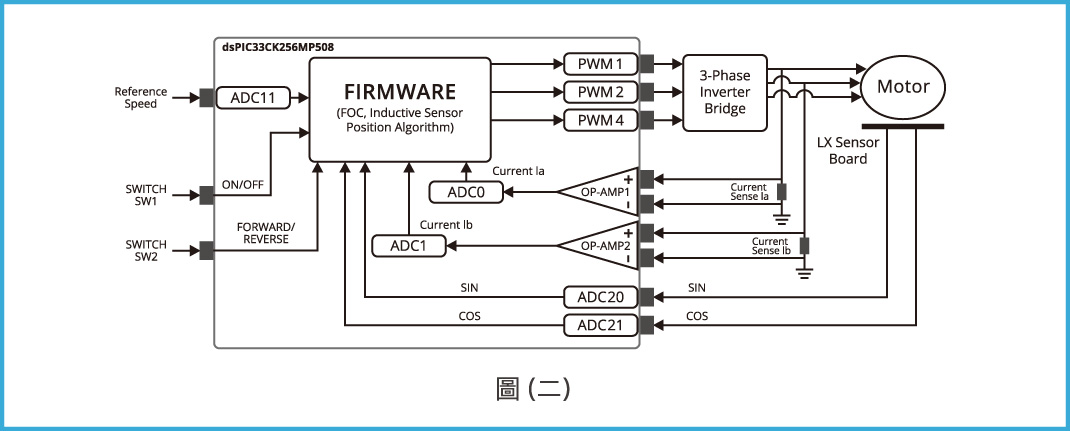
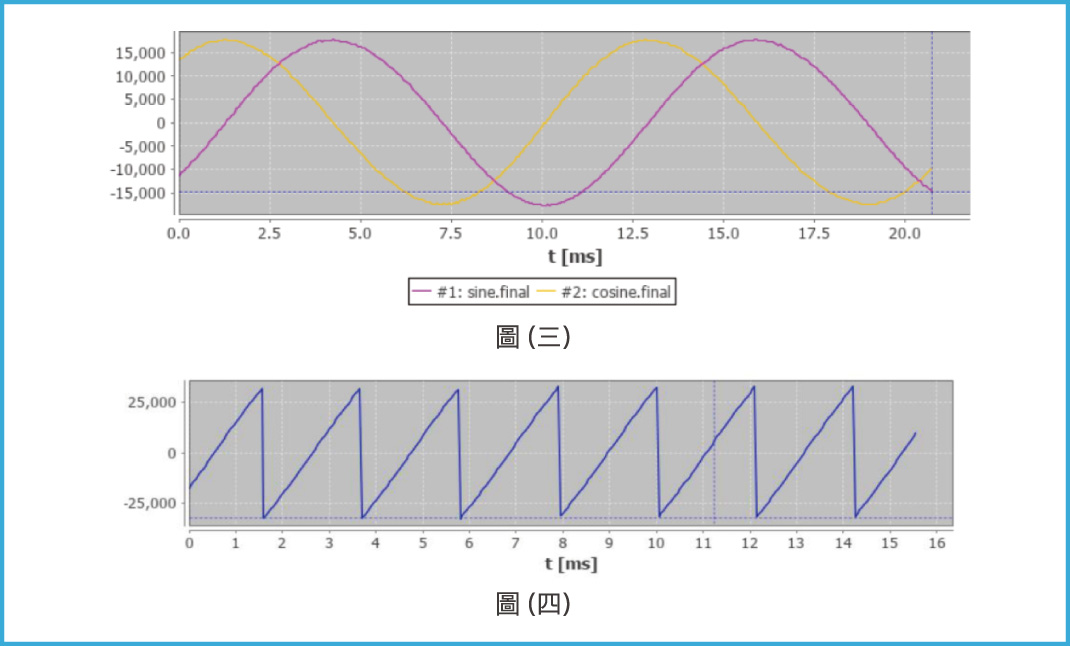
控制架構如圖(二)。此測試平台使用的IPS為LX34050,輸出信號為SIN 及COS波,並由dsPIC33CK 的PWM同步觸發ADC來取樣。取樣之ADC結果(SIN 及COS)經平衡校正後如圖(三)。
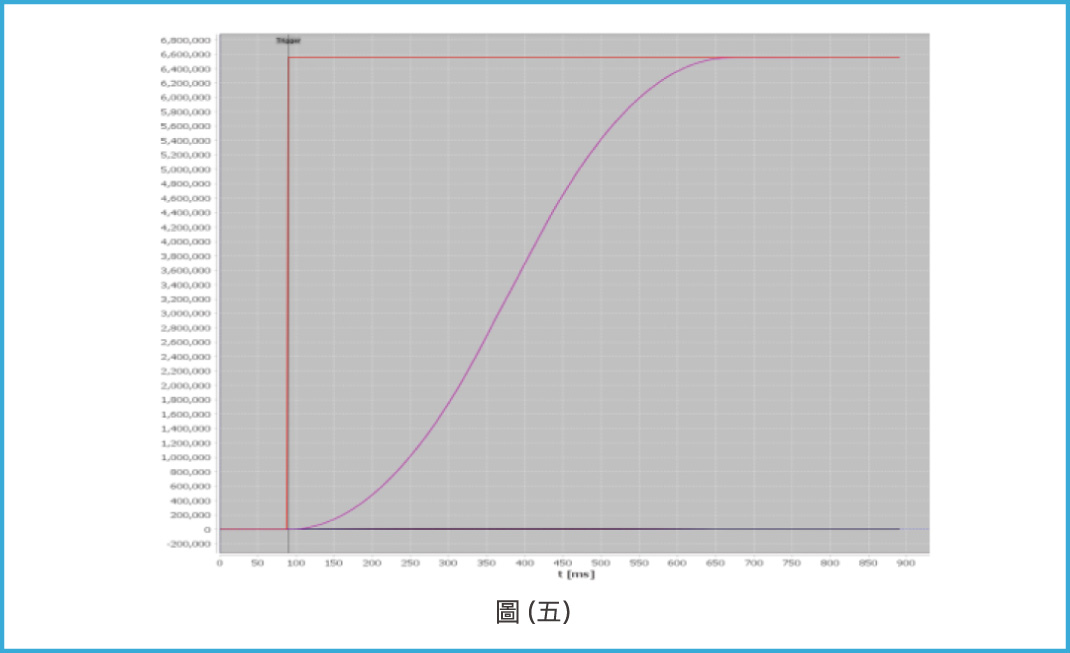
最後以ARCTAN算出連續角度如圖(四)提供給FOC運算。相較於霍爾感測器只能提供60度電氣角的解析度,IPS在速度控制上具壓倒性優勢,更可以做到S 曲線位置控制。測試結果顯示可以等效低於1 RPM的速度進行控制,有機會應用於ADAS(Advanced Driver Assistance Systems)中車道維持方向盤控制應用。
圖(五)是S曲線位置命令測試結果,可看出馬達實際位置(粉紅色線)可以完美的到達最終的位置命令(紅色線),這是僅使用霍爾感測器來做控制所達不到的性能,充分顯示IPS可以大幅改善馬達低速下的速度響應,更能精準地控制具有動能回收的應用,如電動載具,為節能減碳及永續發展(Sustainability)做出更好的貢獻。
本文作者為:Microchip應用工程師經理 葛育中