匹配感測器輸出和 ADC 輸入範圍可能很難,尤其是要面對今日感測器所產生的多種輸出電壓擺幅時。本文為不同變化範圍的差動、單端、單極性和雙極性訊號提供簡易但高性能的 ADC 輸入驅動器解決方案,本文的所有電路採用了 LTC2383-16 ADC 單獨工作或與 LT6350 ADC 驅動器一起工作來實現 92dB SNR。
LTC2383-16 是一款低雜訊、低功率、1Msps、16 位 ADC,具備 ±2.5V 的全差動輸入範圍。LT6350 是一款軌對軌輸入和輸出的、低雜訊、低功率單端至差動轉換器/ADC 驅動器,具備快速穩定時間。運用 LT6350,0V 至 2.5V、0V 至 5V 和 ±10V 的單端輸入範圍可以很容易轉換為 LTC2383-16 的 ±2.5V 全差動輸入範圍。
全差動驅動
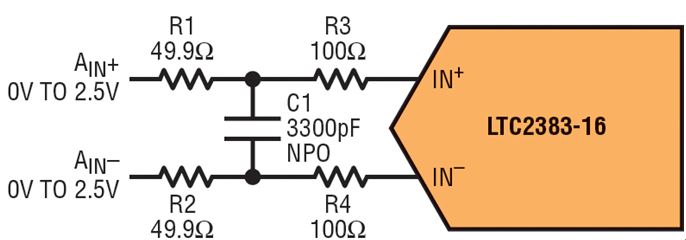
圖 1 顯示了用於本文所述所有電路的基本架構。該基本架構用於至 LTC2383-16 類比輸入的DC 耦合全差動訊號。電阻 R1、R2 和電容 C1 將輸入頻寬限制到大約 500kHz。電阻 R3 和 R4 減輕 ADC 輸入採樣尖峰的影響,該尖峰可能干擾感測器或 ADC 驅動器輸入。
這個電路對於具備低阻抗差動輸出的感測器很有用。驅動 AIN+ 和 AIN– 的共模電壓必須等於 VREF/2,以滿足 LTC2383-16 的共模輸入範圍要求。
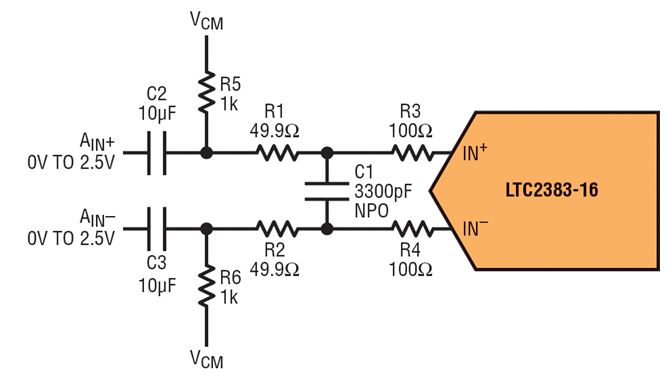
圖 1 中的電路可以是 AC 耦合的,以在必要時,使 ADC 輸入的共模電壓與感測器相匹配。只需通過一個 1k 電阻器將AIN+ 和 AIN– 偏置到 VCM (VCM=VREF/2)、通過一個 10μF 電容器將感測器輸出耦合到AIN+ 和 AIN– 即可,如圖 2 所示。
當驅動 LTC2383-16 這類低雜訊、低失真 ADC 時,選擇合適的元件對保持高性能是相當重要的。這些電路中使用的所有電阻值都相對較低。這可保持較低的雜訊和較短的穩定時間。建議使用金屬薄膜電阻器,以減小由自熱引起的失真。C1 採用的是 NPO 電容,因為這類電容的電壓係數較低,而可將失真降至最小。
單端至差動的轉換
當然,不是所有感測器的輸出都是差動的。以下是一些用單端訊號驅動 LTC2383-16 的方法。
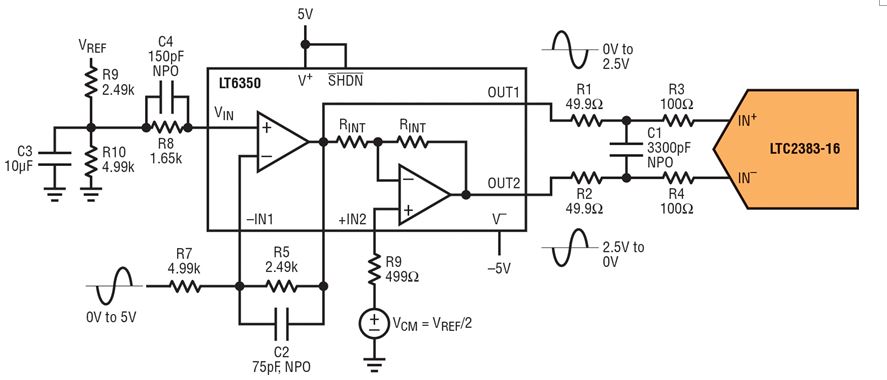
0V 至 2.5V 單端輸入
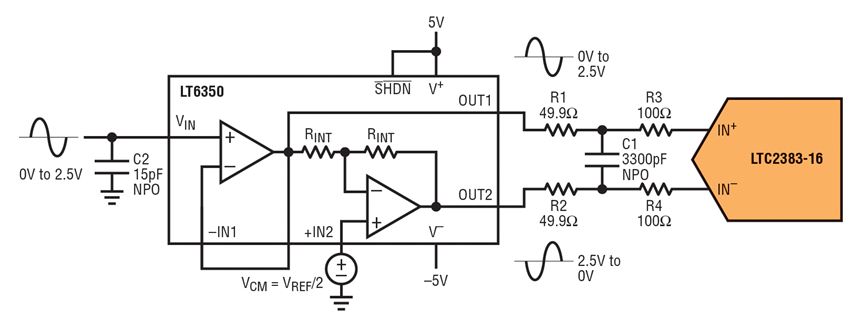
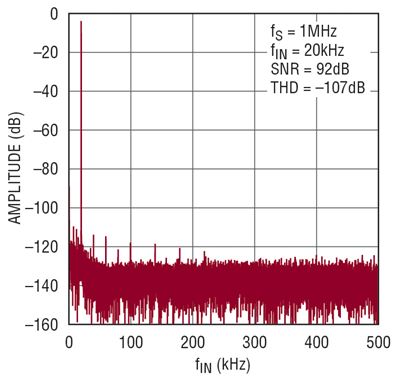
圖 3 所示電路將 0V 至 2.5V 單端訊號轉換為全差動 ±2.5V 訊號。這個電路還具備高阻抗輸入,以便能用大多數感測器輸出直接驅動該電路。如圖2 所示,透過 AC 耦合的VIN,VIN 端的共模電壓可以與 ADC 匹配。第二個放大器的共模電壓在 LT6350 的 +IN2 引腳處設定。圖 4 中的 32k 點 FFT 顯示運用圖 3 所示電路時 LTC2383-16 與 LT6350 合起來的性能。所測得的 92dB SNR 和 -107dB THD 與 LTC2383-16 的典型資料表規格參數緊密匹配。這表明,在訊號通路中插入單端至差動轉換器後,即使引起 ADC 規格參數劣化,裂化程度也是極小的。
0V 至 5V 單端輸入
如果需要較寬的輸入範圍,那麼可以驅動 LT6350 的負輸入,從而允許由 LT6350 的第一級衰減輸入電壓。圖 5 所示電路將 0V 至 5V 單端訊號轉換為 ±2.5V 的差動訊號,該差動訊號驅動 LTC2383-16 的輸入。這個電路的輸入阻抗等於 R7。增大 R7 的值會提高輸入阻抗,從而使驅動更加容易。這麼做的代價是,如果 R7 增加到高於 4.99k,那麼雜訊和失真將會略為有提高,如表 1 所示。
±10V 單端輸入
有些感測器提供高於和低於地的輸出電壓。圖 6 所示電路將 ±10V 的地參考單端訊號轉換為 ±2.5V 差動訊號,該差動訊號驅動 LTC2383-16 的輸入。輸入阻抗仍然由 R7 設定。表 2 顯示了圖 6 電路的雜訊和失真隨輸入阻抗的變化。
結論
LTC2383-16 是一款低功率、低雜訊、16 位 ADC,可非常容易地與種類繁多的感測器輸出連接,包括範圍很寬的單極性、雙極性、差動和單端訊號。
(本文由Linear凌力爾特提供;作者Guy Hoover為凌力爾特混合訊號產品部應用工程師)