前言
处于大家都响应节能的社会中,我们努力的参与创造绿色能源。但我们的能力是开源有限,而节流是无止境的硬仗。能源约有40%是被拿来作为动力使用的。有动力心脏之称的马达就必须背上节能的重任。直流无刷马达(BLDC)是一个高效能的马达,也是今后马达动力节能的要角之一。因为它的效能比传统的马达效能高很多。市面上的直流马达大多使用机械式整流子和电刷,来控制马达相位转换的动作,而直流无刷马达是使用电子式换相机构,减少磨损也降低了效能损失。当然也不像有刷马达需要更换碳刷与碳刷磨擦所产生金属屑与火花的问题。
直流无刷马达一般的驱动方式是采用Hall Sensor 来侦测转子的位置并且提供相位转换信息。但在某些场合上,例如在高温、高湿的恶劣环境,或转速要求极高的环境下,就不适用。应付这些场合的对策就是改用Sensorless的控制策略。Sensorless的控制技术,目前是采取直流无刷马达的反电动势来分析转子的相对位置。反电动势侦测又分了二种,一种是与中性点比较所得到的过零点,另一种是相对于相电压做比较所得到的换相点,前者的做法是直流无刷马达三相中的任意一相与中性点做比较所得到的过零点,对直流无刷马达而且,是不会把马达中性点拉出的。所以我们必须透过硬件电路制造一个假设中性点。这种做法所可能会造成过零点漂移,会造成误判断导致换相点不正确。再者,经由反电动势测到的过零点必须再Delay30度电气角才可以换相;后者则是直流无刷马达三相中的相邻二相电压做比较,没有前者过零点漂移的问题,也不需要Delay30度,在程序或在硬件方面也较简单,也由于不用Delay30度,所以直接反电动势取得之换相状态可以供给直流无刷马达在安装Hall时,作为Hall之位置校正。由于无刷马达在安装Hall Sensor时角度不好拿捏。本设计可以用来帮助Hall Sensor的安装与取代在较差的环境中使用。
Sensorless与Hall Sensor的马达比起来,Sensorless体积较小,节省了安置Hall Sensor的空间,又可以克服一些高噪声的环境,因为这些种种因素使得精密仪器也有越来越多是采用此控制原理。本设计从商场需求之角度为本,并以产品功能优化为用,以设计性价比高之产品为最终目标。缘此,本作品利用HOLTEK所生产的直流马达控制IC-HT45RM03作为系统控制核心,再搭配HT45B0C 这颗专门驱动MOSFET gate driver的专用IC以大幅的降低所需求的硬件电路。在显示部份我们采用了最有价格优势的MCU HT48R10A作整个系统的信息显示,以达成了低价格高功能的产品。实验证明本设计是符合产业界期望的高功能、低成本、高稳定度的节能产品。
工作原理
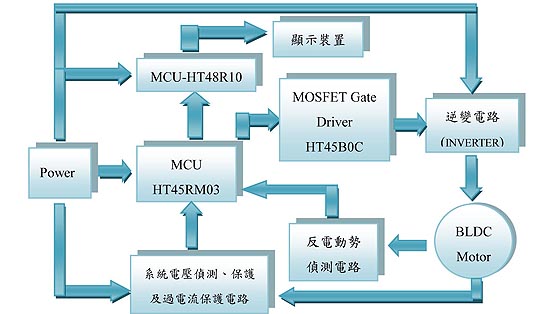
本系统的硬件架构由电源电路、MCU控制电路、马达驱动电路、反电动势侦测电路、显示电路及过电流、低电压保护电路等六大电路区块合成,如图一所示。
电源电路主要是将DC24V电源经由降压与稳压电路后分配各IC所须的+5V、+15V至各IC,使得IC均可正常工作。MCU控制电路由HT45RM03作为整各系统的核心控制,利用A/D转换器来判读现在电压及电流、利用A/D读取调速Sensor,供用户任意的调整转速快、慢,由A/D所读到的值再经由PWM和HOLTEK的高压MOSFET Gate Driver - HT45B0C来驱动无刷马达到所设定的运转状态。
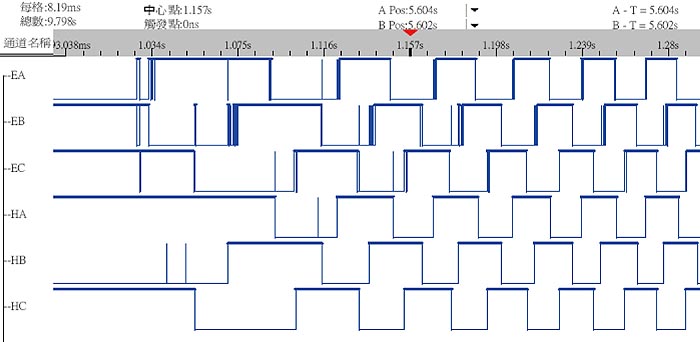
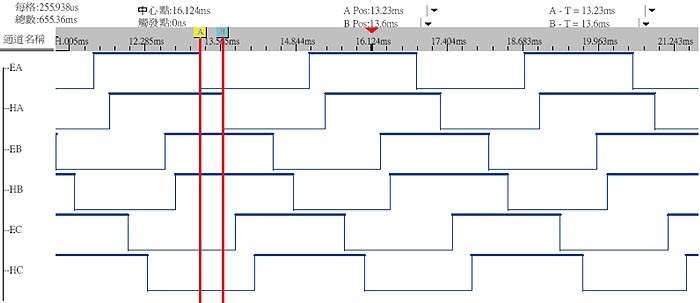
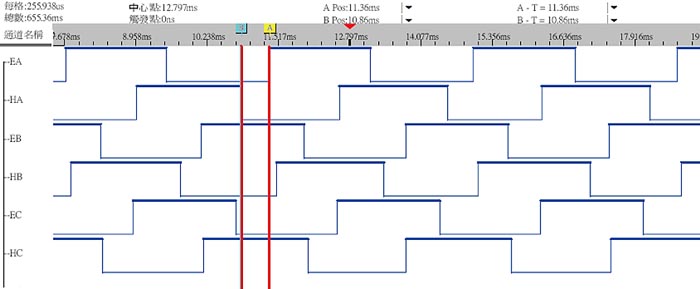
整个电路包含了Sensorless与Hall Sensor电路,以方便我们产生换相所对应的逻辑来驱动马达运转。以前的反电动势电路是采用电容与电阻的组合电路来完成与马达中性点的过零点比较后再由软件Delay30度后才决定驱动电路开通。我们的做法是采用相邻两相的相电压依序经比较电路取得换向信号。我们经由马达的反电动势再由相电压对相电压相减就可以清楚得知道目前马达转子的位置在哪里,这个就是我们做Sensorless控制器的方法。
整体运转的讯息,例如转速、正∕反转、过电压、低电压与过电流等等,均透过显示设备来显示。但因HT45RM03的接脚数目不够,所以必须将所有的讯息由HT45RM03传送至HT48R10A,再经由HT48R10A来控制整个显示设备以显示各种信息。
整体运转的讯息,例如转速、正∕反转、过电压、低电压与过电流等等,均透过显示设备来显示。但因HT45RM03的接脚数目不够,所以必须将所有的讯息由HT45RM03传送至HT48R10A,再经由HT48R10A来控制整个显示设备以显示各种信息。
作品功能
本作品具有下列八项功能:
(1)Sensor与Sensorless之控制选择:依据用户设定来决定MCU是使用Sensor或是Sensorless的驱动控制方式。
(2)过电流保护:利用马达的回授电流经由OP放大器来检测回授电流大小,再经由比较器来判定是否过电流,以避免MOSFET过度负荷而损毁驱动电路。
(3)低电压保护:由Power端量测,如果电压过低会自动关闭整个系统。
(4)电流检测:将马达的回授电流经由OP放大后检测目前电流的大小。
(6)帮助检查Hall Sensor的安装是否妥当。
(7)适当时机可以做 Hall Sensor的疲劳或老化的体检,增加系统的安全性与可靠度。
(8)信息显示:由显示设备来显示,电压、电流、转速、正/反转。
控制芯片使用功能
我们使用了HT45RM03的外部中断(/INT0、 /INT1、/INT2)用来读取换相讯号、3信道的PWM与3逻辑I/O作为MOSFET gate driver-HT45B0C开通Power MOSFET的讯号、由于HT45RM03的芯片提供了比较器与OP放大器,所以我们使用了HT45RM03内部的比较器做过电流比较以保护整体电路、使用HT45RM03内部的OPA做电流放大后由A/D读取。由A/D读取系统电压,以作为低电压保护及通知、由A/D读取VR作为马达调速依据、使用了HT45RM03的TIMER中断来做固定时间电流读取、转速读取、缓启动等等的时间依据。综合而言,我们在HT45RM03内部使用了:
- ●3 channels A/D converter
- ●3-channel PWM with complementary
- ●3 channels external interrupt
- ●One operational Amplifier
- ●One comparator with interrupt function
- ●One internal timer interrupt
- ●5 digital I/O lines
另外,在HT48R10A我们使用了外部中断,来接收HT45RM03传过来的数据、并使用TIMER作为扫瞄七段显示的控制,我们藉由按钮可以切换显示电流、电压和RPM,以得到整个系统的状态。
作品结构
硬件部份
由图二的电源电路可以看到我们是由24V经过C1稳压提供马达运转及内部电源使用,所以电源一路直接供给马达转动,另一路则经降压、稳压,得到15V、5V。15V作为HT45B0C的VM电压,而5V供给MCU ( HT45RM03、HT48R10A )、MOSFET Gate Driver(HT45B0C)和内部讯号之电源,D1为系统电源灯。
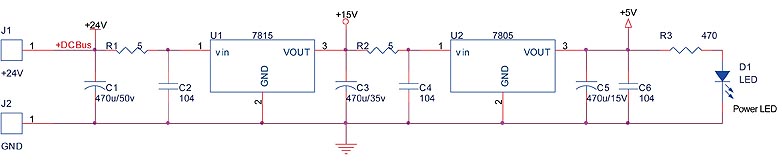
| 《图二 电源电路(POWER)》 - BigPic:781x161 |
|
在图三的MCU电路图中D1为RUN/STOP的指示灯,D2为正/反转指示灯、D3为Sensor与Sensorless状态指示灯、D4为过电流指示灯、而D5为低电压指示灯。使用了HT45RM03内部的比较器和放大器做了保护电路和侦测电路,当马达负载过大或环境因素造成电流过大时会由过电流保护保护住,避免烧毁整个系统。如电池或电压源供电过低,由A/D侦测到电压过低时会自动提醒或更低时会由系统切断整体电路,避免造成误动作并保护电池避免过度放电而毁损电池。侦测由马达回朔的电流经采样电阻后取得相对的电压,并经由HT45RM03内部OP放大器做放大后输出至A/D读取。我们采用可变电阻VR以作为无刷马达速度调适。PD0是与HT48R10A沟通的I/O,会传送序列讯号至HT48R10A,作为整个系统的显示信息。
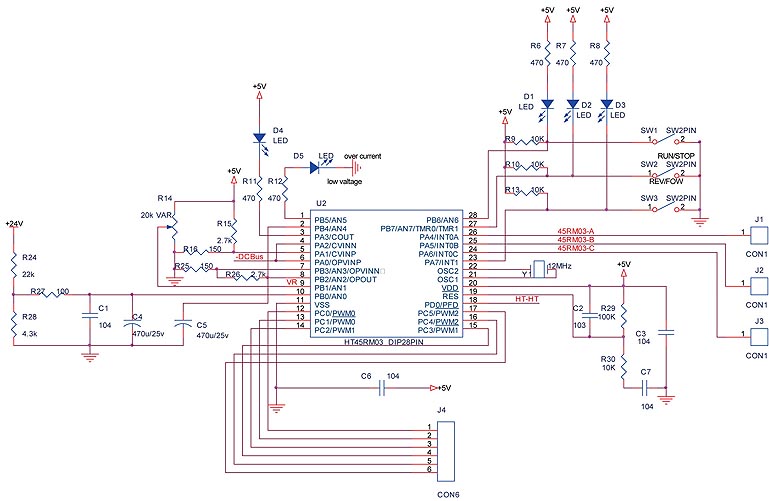
| 《图三 MCU-HT45RM03电路图》 - BigPic:768x500 |
|
我们在HT48R10A做了整个系统信息显示,由图四可以看到HT45RM03传来的信息经由HT48R10A的外部中断(PC2)接收序列讯号,得到整个系统信息储存后,可藉由按钮选择切换电压、电流或RPM信息,然后经由七段显示器来显示所选择的信息。

| 《图四 MCU-HT48R10A电路图》 - BigPic:575x530 |
|
驱动电路是由HT45RM03接收反电动势或Hall sensor 讯号以得到MOSFET开通讯号,再把这6个开通讯号传送至MOSFET Gate Driver IC (HT45B0C)来驱动MOSFET的开关以达成直流无刷马达的换相。图五为HT45B0C的电路图。
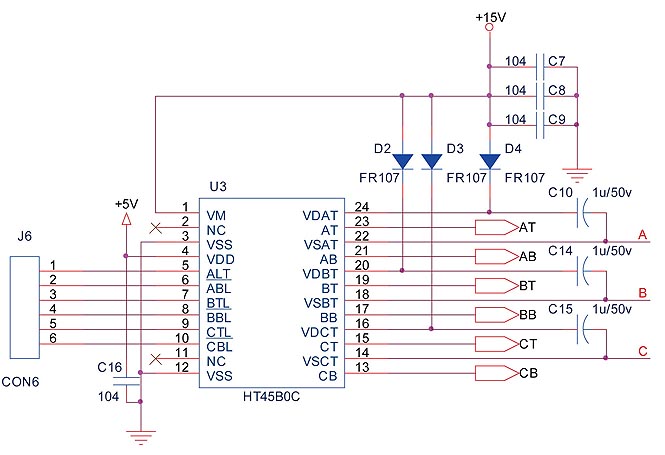
| 《图五 HT45B0C MOSFET Gate Driver 驱动电路》 - BigPic:664x454 |
|
图六是由六个MOSFET所组成,用来开通无刷马达换相的逆变电路,图中R17为电流采样电阻。

| 《图六 逆变电路(INVERTER)》 - BigPic:761x296 |
|
图七反电动势侦测电路是由马达三相之相电压与相电压经由比较器做比较后得到三个讯号EA、EB和EC,这三个讯号就是用来取代Hall sensor的换相讯号。

| 《图七 反电动势相与相相减电路》 - BigPic:624x450 |
|
软件部份
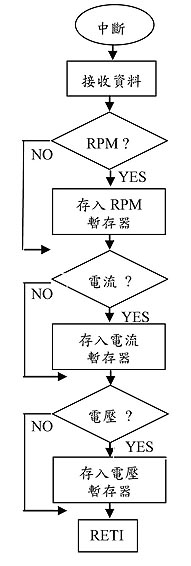
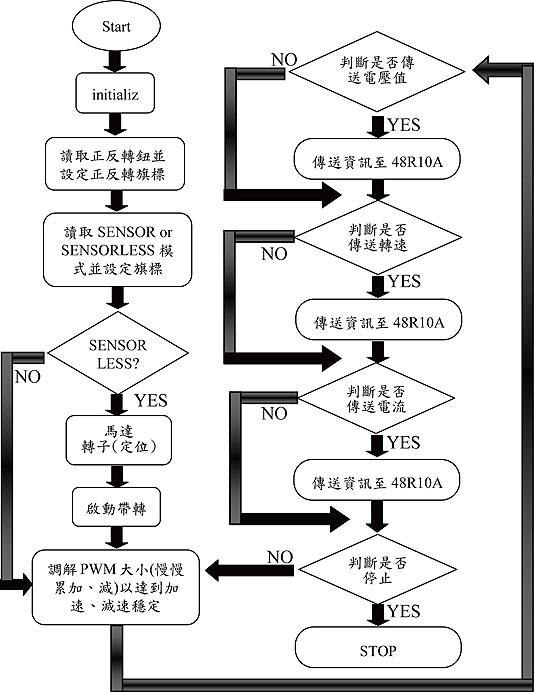
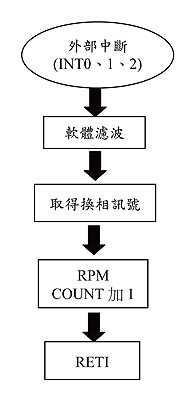
HT48R10A这颗MCU主要是用来显示信息,图八是HT48R10A的主程序流程,是在计算RPM、电压和电流值并做显示。图九中的TIMER中断是用来做扫瞄七段显示用的。由HT45RM03所传来的讯号,是进入图十的外部中断处理。