本文叙述先进汽车控制演算法的处理器??圈(processor-in-the-loop;PIL)模拟开发原型系统;说明如何以模型为基础的设计流程建立控制演算法的模型,并且对其进行评估,接着部署至混合动力车辆开发平台。
当转为透过运算能力来定义的车辆功能愈来愈多,工程师为能源管理、电池管理和动力传动控制所设计的演算法也变得更加复杂。这使得能够即时执行运算量密集演算法的车用处理器的需求增加。
为了展示NXP处理器的能力,我们的团队为了先进汽车控制演算法的处理器??圈(processor-in-the-loop;PIL)模拟开发了一个原型系统。我们使用Simulink,以模型为基础的设计流程建立控制演算法的模型,并且对其进行评估,接着部署至NXP S32S GreenBox II混合动力车辆开发平台(图1)。
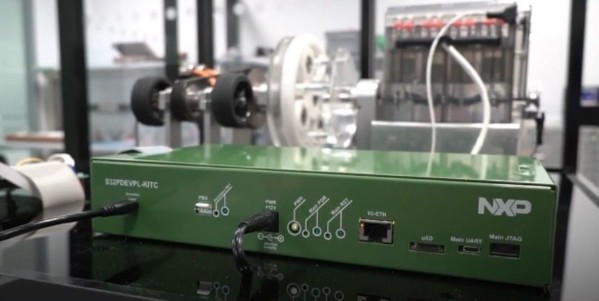
| 图1 : S32S GreenBox II混合动力车辆开发平台。 |
|
我们从内含混合动力车辆(hybrid electric vehicle;HEV)受控体模型和经过优化的监督控制器(supervisory controller)叁考应用开始。这使得NXP展示系统开发的时间缩短了超过九个月。
HEV与控制器建模
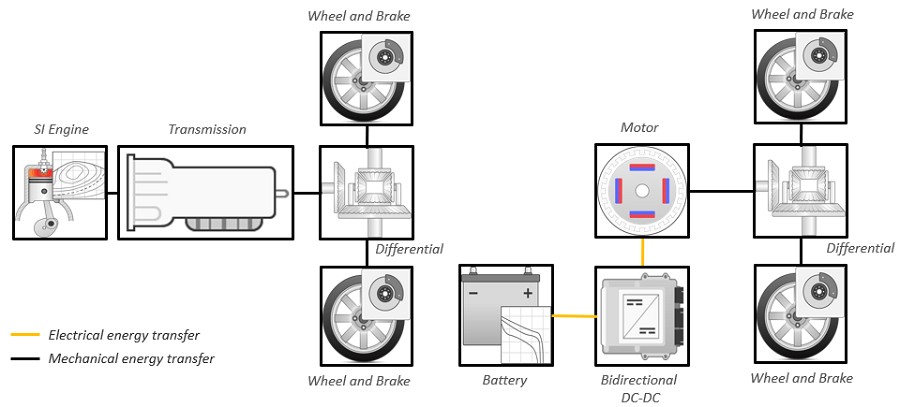
我们的工程师在半导体领域相当专业,但是对於车辆建模与先进能源管理控制策略的直接经验就比较有限。为了节省建立完整、系统层级、又与客户使用的模型相似的HEV模型的时间,使用了Powertrain Blockset中的HEV P4叁考应用。这个P4叁考应用包含一个完整且预先建立的HEV模型,其中有一个火星点燃引擎、传动、锂离子电池、以及电动马达(图2)。
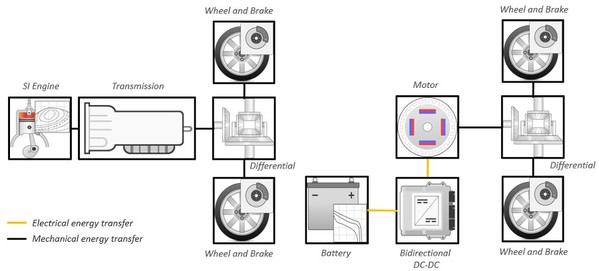
| 图2 : 透过Powertrain Blockset元件建立的HEV P4动力传动模型。 |
|
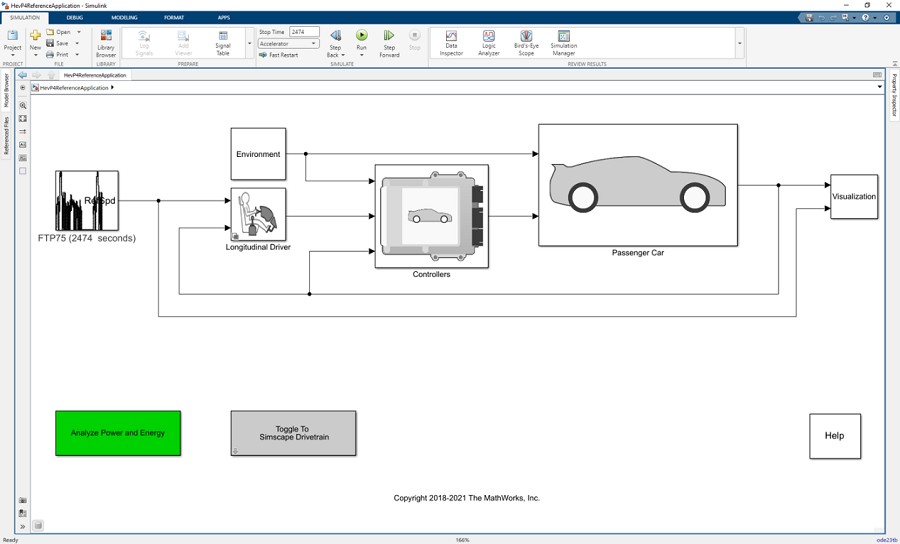
除了HEV模型之外,叁考应用也包含了引擎、传动与P4混合控制模组,还有其他能够执行全面性封闭??圈模拟的元件(图3)。以Drive Cycle Source and Longitudinal Driver模组为例,它会产生一个标准的纵向驾驶周期,并且将速度(velocities)转换为正规化的加速度与制动指令。
从车辆速度、引擎速度、电池充电状态和燃料经济性(以MPGe为单位)的子系统图表,让我们能够将车辆层级的表现与随着模拟的驾驶周期的能源使用视觉化呈现。
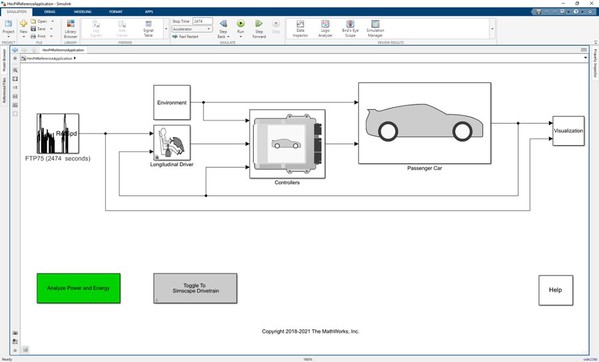
| 图3 : 封闭??圈HEV P4模型,包含控制器、车辆、驾驶周期、以及视觉化呈现的子系统。 |
|
於GreenBox II执行PIL模拟
在执行PIL模拟之前,先经过一次模型??圈(model-in-the-loop)模拟,帮助熟悉含在叁考应用内的HEV模型与等效油耗最隹化策略(Equivalent Consumption Minimization Strategy;ECMS)演算法。这个由史丹佛的Dr. Simona Onori开发的监督能源管理演算法能够找出从引擎或电动马达的最适化平衡来提供车辆动力。
为了要在GreenBox II执行ECMS演算法,我们使用Embedded Coder从控制模型产生程式码,并且使用NXP Model-Based Design Toolbox(MBDT)硬体支援套件来部署。MBDT包含了初始化的例行程序以及装置驱动器,让复杂的演算法可以容易地部署且执行於NXP处理器(图4)。
使用这样的设置来执行PIL模拟,其中加速和制动指令会由Simulink传送到在GreenBox II上执行ECMS演算法的控制器。这个控制器产生引擎与电动马达力矩指令讯号,这些讯号会被传送到HEV受控体模型。引擎速度和马达速度等来自於受控体的讯号再回授给控制器。在PIL模拟过程,会在这些讯号和其他的主要衡量指标更新於Simulink时监测它们(图5)。
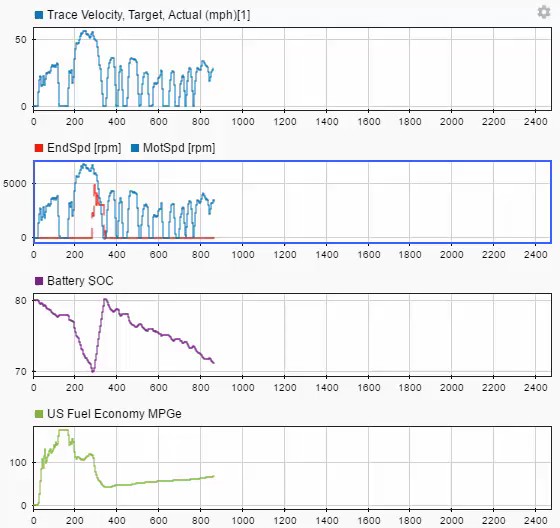
| 图5 : 某一段运作时间内的速度、引擎和马达速度、电池充电状态、燃料经济性的图表。 |
|
设置的延伸与改善
在GreenBox II平台执行首次的ECMS演算法PIL模拟之後,我们完成了几项设计迭代。举例来说,Vehicle Dynamics Blockset的转向与悬吊系统被整并到原始模型,可以用即时的加速、制动、转向控制来取代预先定义的驾驶周期。并且加入了会在加速和制动时启动的微型车轮和电动马达;同时将一个以Unreal Engine为基础的3D模拟环境纳入Vehicle Dynamics Blockset(图6)。
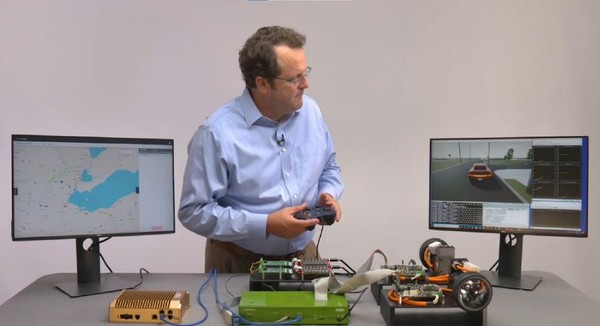
| 图6 : 作者正在控制一个PIL模拟,同时查看车辆的3D视觉化结果。 |
|
更近期的设置版本包含透过NXP GoldBox service-oriented gateway来整合Amazon Web Services(AWS),这可以管理车辆资料到AWS cloud data stores的流程来进行分析和报告。
未来的应用将利用S32Z和S32E即时处理器。NXP GreenBox 3即时研发平台融合了S32E,内含更强大的数学运算执行能力,因此可支援更先进、运算更密集的应用。
(本文由??思科技提供;作者Curt Hillier任职於恩智浦半导体)