步进马达可被看作是无需换向的电动马达。通常的情况下,马达中的所有绕组是定子的一部分,转子是个永磁体,在可变磁阻马达中,转子是一些软磁材料的齿块。所有换向必须由马达控制器在外部处理,通常情况下,马达和控制器经由设计,令马达可保持在任意固定位置,及向一个方向或另一个方向旋转。正如我们所知,大多数步进马达可以音频频率步进,令它们能很快旋转,使用合适的控制器,它们可立即在控制的方向启停。
步进马达主要用于定位应用,但他们并不是唯一拥有这项功能的工具。
下方是常见用于定位的马达所选择的基本资讯。请注意,可能还有其他的选择,如AC感应马达或压电马达,但列出的这三大马达类型代表了当今针对通用运动控制的绝大多数应用。
1.步进马达—这些马达是自定位的,因而使用简单。它们既不需要编码器来保持位置,也无需伺服控制回路。主要缺点是振动和杂讯,和有限的速度范围。像无刷直流马达必须在外部使用多相驱动器「换向」。
2.直流有刷马达—这些马达需要一个位置编码器用于回馈,和使用一个PID(比例、积分和微分)控制器或其他位置回路控制器来稳定。这些马达无需外部相位调整—提供一些电流就可以了。但是在马达内部完成换向的机械刷可能最终磨损和失效。
3.无刷直流马达—这些马达需要带有编码器的伺服控制,用于回馈及外部电子换向。它们无刷但在较大速度范围提供高转矩。相较直流有刷马达,当今的无刷直流马达因为降低过去更高的成本,提供在伺服控制应用中的「go to」选择。
对于某些应用,需要在使用伺服马达和步进马达之间作选择。这两类马达可能提供相似的精确定位,但它们的方式不同。伺服马达需要某种类型的类比回馈控制系统。通常情况下,这包括一个电位器来提供关于转子位置的回馈,和一些混合电路通过马达来驱动电流,这电流与所需位置和当前位置之间的差异成反比。
在步进马达和伺服马达之间作选择时必须考虑一些问题;选择哪个将取决于应用。例如,使用步进马达完成定位的可重复性取决于马达转子的几何形状,而使用伺服马达完成定位的可重复性一般取决于电位器和回馈电路中其他类比元件的稳固性。
步进马达可用于简单的开环控制系统;用于以低加速度及静态负载工作的系统一般是足够的,但对于高加速度,特别是如果涉及可变负载,那么闭环控制可能必不可少。如果在开环控制系统中的步进马达是超转矩,转子位置的所有资讯都被丢失,那么系统必须重新初始化;伺服马达不受这问题影响。
步进马达类型简介
步进马达有两种,永磁和可变磁阻(还有混合马达,从控制器的角度,它与永磁马达没有区别)。如果马达上没有标签,您可在未提供电源时大致凭感觉辨别这两者。当您用手指扭转转子时,永磁马达往往「钝齿」,而可变磁阻马达几乎自由旋转(虽然它们由于转子顽磁可能轻微钝齿)。您也可使用欧姆表区分这两种马达。可变磁阻马达通常有3个(有时4个)绕组,及一个返回值,而永磁马达通常有两个独立绕组,带或不带中心抽头。中心抽头绕组用于单极永磁马达。
步进马达有宽范围的角解析度。粗糙的马达通常每步转90度,而高解析度的永磁马达通常能处理每步1.8度或什至0.72度。使用适合的控制器,大多数永磁马达和混合马达可以半步运转,并且某些控制器可处理更小的分步或微步。
对于永磁步进马达和可变磁阻步进马达,如果只有马达的一个绕组通电,转子(在空载下)将捕捉到一个固定的角度,然后保持该角度,直到转矩超过马达的转矩,此时,转子将转向,试图保持在每一连续的平衡点。
–可变磁阻—这种马达不使用永磁体。因此,转子可无约束地或无「钳制」转矩的移动。这种构造最不常见,一般用于无需高度转矩的应用,如载物片的定位。
–永磁—也被称为「canstack」或「tincan」马达,该设备有个永磁转子。它是个相对低速、低转矩的设备,有45度或90度的大步距角。这简单的构造使这些马达的制造成本很低,令其适用于低功率应用。
–混合步进—这版本的步进马达巧妙地结合了可变磁阻和永磁两种类型。
步进马达基本原理
步进马达的功能
– 旋转角度与输入脉波数成正比
– 旋转速度与输入脉波的频率成正比
– 开环系统无需位置回馈
– 对加速、减速和步进指令的极佳回应
– 非累积定位误差(+/-5% 的步距角)
– 卓越的低速和高转速功能,无需齿轮减速器
– 在通电时保持转矩
– 固有的钳制转矩
– 双向运转
– 可停止而不损坏马达
– 无刷用于更长的无故障使用时间
– 精密的球轴承(取决于品牌/类型)
步进马达的缺点
– 如果控制不正确会发生共振
– 在极高速度下不易操作
– 如果超转矩,位置的所有资讯都被丢失,系统必须重新初始化
– 生产比等效的直流/交流马达的给定尺寸更小的转矩
绕组连接
步进马达有若干不同的引线配置。最受欢迎的是:
4引线 - 双极
5引线 - 单极
6引线 - 单极, 双极(串联)
8引线 - 单极, 双极(串联)和双极(并联)
步进模式
步进马达可以多种不同序列被驱动。最常见的是:
波驱动
在这种模式下,在任意给定时间只有一个相位被激励。这意味着对于单极马达只有25%的可用绕组被利用,对于双极马达只有50%的可用绕组被利用。
整步驱动
在这种模式下,在任意给定时间两个相位都被激励。这意味着对于单极马达有50%的可用绕组被利用,对于双极马达有100%的可用绕组被利用。
半步驱动
在这种模式下,波驱动和整步驱动序列交替进行,使转子能在半步内对齐。这意味着对于单极马达平均有37.5%的可用绕组被利用,对于双极马达平均有75%的可用绕组被利用。
应用
*工业机器—步进马达用于汽车仪表和机床自动化生产设备。机器人制造、检验和制程。
*安全监控—安全监控业界的新监控产品,包括监控摄影机PAN/ZOOM/TILT
*医疗—步进马达用于医用扫描器、采样器,还有在数位口腔摄影中见到的液压泵、呼吸机和血液分析仪。
*消费电子—步进马达在摄影机中提供自动数码相机对焦和变焦功能。
除了上述的应用,还有商用机器应用、电脑周边应用。
步进马达驱动器方案
随着更加注重安全监控、医疗和工业应用,及降低系统级设计和组装成本,所有制造商都转向更高的整合水准及降低总体成本。数位世界中的高度整合并不是新鲜事,每18个月就会翻倍,积体电路的尺寸缩小近50%。在马达通常处于的电源类比世界中,似乎不是那么简单。需要考虑马力、在马达驱动过程中的散热和杂散电流,驱动器必须是高效能的、小型的和易于整合到一个类比马达世界里。
重视成本、精度和易用性的世界已转至步进马达应用。如前几段所述,步进马达理论上是一大简化的奇迹。它无刷或接触。基本上它是个同步马达,使用电子磁场切换至旋转电枢磁体。它将数位脉波转换为机械轴旋转,换言之它是个「数位马达」。
控制步进马达中的电流
使用H桥控制2个马达线圈中的电流—电压模式。
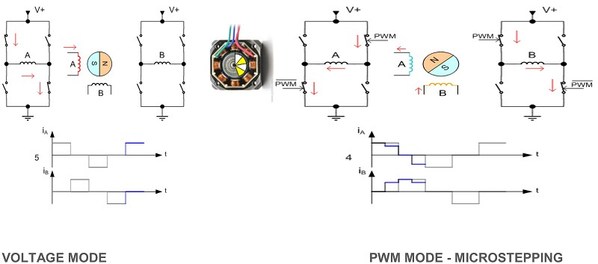
| 图1 : VOLTAGE MODE 电压模式(左);PWM MODE – MICROSTEPPING PWM模式—微步进(右) |
|
步进马达驱动器必须取决于以下关键因素:
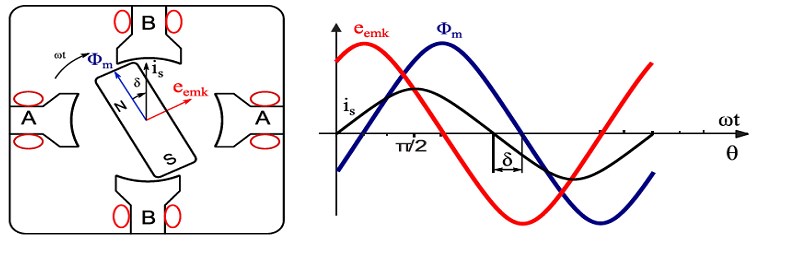
1.转矩/转矩效能—转矩是绕轴旋转物体的力。产生转矩需要两个元件—由永磁体产生的转子磁场和由定子电流产生的定子磁场。当磁场方向相反时,转矩最大—通过增加线圈电流,在-1/2或1/2处的转矩将增加,当效能达到最大时,提供的最大转矩等于负载。关键点—在稳定区域的边缘提供最大转矩,如果不注意驱动器逻辑,将造成马达停止的风险。
2.负载角—负载角c是定子和转子之间的角度。在产生的转矩和负载之间是平衡的「p」。随着负载增加,负载角d也会增加。
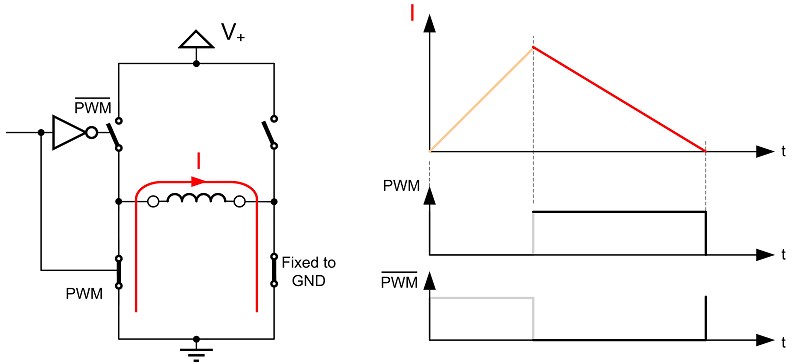
3.电流控制—通过使用脉宽调制(PWM)和切换H 桥,电压将切断马达线圈和绕组。当电压跨越线圈,电流将增加。当线圈短路,电流将减小,也被称为「衰减」。
步进马达驱动器和应用面临的关键问题
随着安全监控成为全球第一关注点, IP监控摄影机的使用在过去五年已翻两番。随着数位摄影机采用前端技术,最大的缺点是增加使用低成本的CMOS 和CCD图像感测器。影音品质很大程度上取决于感测器解析度,当摄影机平移或倾斜时,「数位失真」即影音失真可清楚看到。最初解决问题是采用昂贵的类比马达驱动器及基于轴编码器品质的高解析度伺服回馈。使用这种驱动器非常昂贵,必须采用不同方案以提供影音品质,及降低成本和复杂度。
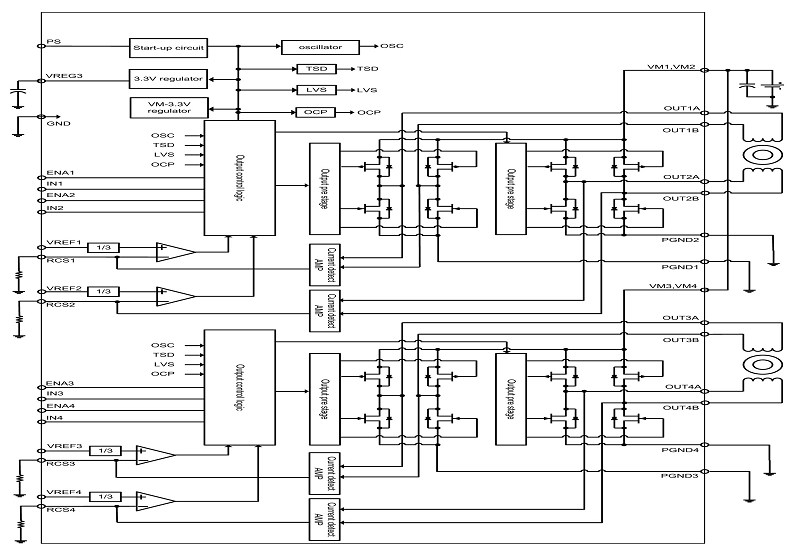
高度整合的双通道PWM恒流控制步进马达驱动器LV8714采用内置的全4路H桥切换电源和PWM逻辑驱动器,可驱动两个步进马达或4个直流有刷马达。使用LV8714,任何设计人员可在数周内而不是数月完成从零到完整的PTZ监控摄影机的设计。由于参考输入电压用于每一H桥,LV8714可同时驱动两台马达。宽输入电压范围为4 – 16.5 V,适用于下列摄影机应用:乙太网供电的(PoE)监控摄影机、PoE销售点终端、文档扫描器、装配线品质控制、平板扫描器和多功能印表机。
内置许多安全功能,如:步进马达驱动器
1.单电源电压以降低成本
2.由于内置低导通电阻的FET,提供高效能和更低能耗
3.内置电流检测电阻以减少元件数和进一步降低功耗。较竞争元件降低35%的功耗
4.全面的安全设计提供过流和过热关断,无需使用外部元件
(本文作者Arthur Gonsky任职于安森美半导体)