麻省理工学院(MIT)与史丹佛大学的工程师团队合作开发出一种新型机器夹爪。这款机器人能像藤蔓般蜿??生长并缠绕物体,不仅能抓取花瓶、西瓜等易碎或不规则物品,其大型版本更能将卧床病患安全地从床上抬起,为长照护理与工业搬运提供了一种比传统夹爪更温柔的解决方案。该研究成果已於今日发表在《Science Advances》期刊上。
 |
| /news/2025/12/14/0952133940S.jpg |
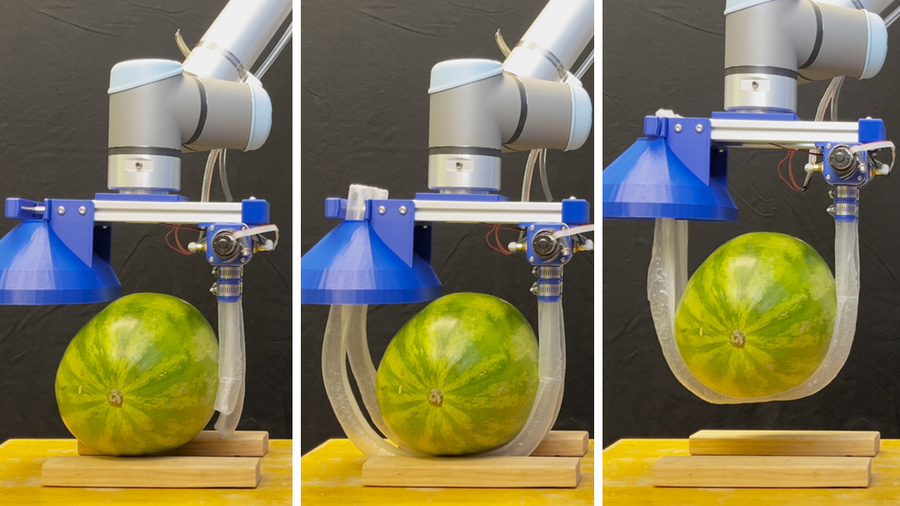
这款新型机器人的核心结构包含一个加压箱体,运作时会从中充气延伸出长条状、类似藤蔓的管状物,其过程如同袜子翻面般向外生长。随着管道延伸,这些「藤蔓」会扭曲并盘绕在目标物体周围,随後继续生长绕回箱体,并被自动夹紧固定。接着,机械装置会将其卷回,形成一个柔软的吊索结构,将物体轻轻抬起。
研究团队指出,史丹佛大学过去在软体藤蔓机器人领域已有开创性发展,这类机器人利用气压控制,能像植物般从尖端生长,穿越狭窄或杂乱的空间。然而,过去的设计多属「开环」系统,无法自行固定形成??圈。此次MIT与史丹佛的合作突破了这项限制,新设计结合了开环与闭环的优势:先以开环形式穿过障碍物(例如钻入躺在床上的人体下方),再回到起点形成闭环,创造出稳固的悬吊结构。
在实际演示中,研究人员展示了大型机器人系统如何将模拟病患从床上平稳抬起。MIT机械工程系博士候选人Kentaro Barhydt表示,将病患移出病床是照护者体力负荷最重的工作之一,这类机器人不仅能减轻照护者负担,也能让病患感到更舒适。史丹佛大学工程学教授Allison Okamura则补充,相较於人形机器人,这类软体机器人更安全、成本更低,且能针对特定人类需求进行优化设计。
除了医疗照护,该技术展现了极高的通用性。团队开发的小型版本可安装於商业机器手臂上,成功抓取并抬起西瓜、玻璃花瓶、壶铃等重物或易碎品,甚至能从杂乱的箱子中精准抓取目标。研究团队正计画将此技术推广至农业采收、仓储物流及港囗起重机自动化等重工业领域。