车用电子介面的特殊性
近年来车用电子成为电子工程的新应用焦点,然而车用电子迥异于消费性电子,亦不同于资讯电子,几乎可说是一个全然独立的领域。其原因无他,因为车用电子高度讲究安全性,必须能通过各类型的耐受实证,且必须能长期供货,一部汽车的寿命若是20年,其零组件就必须随之供货20年,这可不像消费性电子,从上市到停产仅有1至2年时间的过程。
车用电子的特殊性从其介面技术来看最为鲜明,例如LIN(Local Interconnect Network)、CAN(Controller Area Network)等都是属于车用电子介面,这些介面都未应用于PC或CE产品中,相反地PC领域所常用的是USB或是ATA等介面形式。
唯一殊途同归之处,在于无论是资讯还是车用领域,其内部所用的介面都不止一种,经常要搭配使用多种介面,例如PC内有PCI Express、USB、SMBus等,而汽车内也有LIN、CAN、 MOST(Media Oriented Systems Transport)等。一言以蔽之,PC内部不可能仅用一种介面来连通全部零组件。相同地,一部汽车内也不可能只用单一介面来连通全8ECA各类系统。
车用电子所用的介面不仅与PC和CE领域大不相同,且各类型的介面都还在持续演化提升当中,近年来产业界提出的各类型车用介面,又以FlexRay最受瞩目,FlexRay介面到底与以往的车用电子介面有何差异?为何需要此种新介面? FlexRay的出现是否会取代现有哪些种类的车用电子介面?以下本文将对FlexRay进行更深入的讨论。

| 《图一 FlexRay的注册商标带有一只燕魟 》 | 数据源:FlexRay.com |
|
介面技术版本演化
FlexRay 2.1 Rev A
虽然FlexRay介面技术的制订和推行机构FlexRay Consortium早在1999年就已经成立,不过却迟迟没有公布FlexRay介面标准,直到2004年6月才进行发布,且首次发布的版本就是2.0版,这表示FlexRay 1.0从未出现过。值得注意的是,FlexRay并非属于全然原创的新介面技术,其诸多技术内容皆参考更早之前的byteflight介面技术。
| 《图二 如图所示,byteflight与FlexRay较适合安全性操控的传输,CAN、LIN则适合车体性操控的传输,而MOST、IDB-1394等则适合车用影音媒体信息的传输。 》 | 数据源:Fujitsu.com |
|
FlexRay 2.0发布后不到一年的时间,在2005年5月进行了一次修订,亦即FlexRay 2.1版,其修订范围主要是在规范书中的第3章与第10章为主,重新编排第3章SDL程序部分,并整个移除第10章BG参考及BGSM部分,其他则包含了一些小范围的修改,包括更新图片,更正多处的非技术性内容等等,另外附录B组态限制的内容则几乎全部重写。
在FlexRay 2.1之后于2005年12月发表的是FlexRay 2.1 Rev A版本,内容包括更新zLastDynTxSlot、重新安排通道闲置的侦测、新增a类型变数、用计时器取代位元计数器、修订附录B、以及其他如改以颜色区分SDL信号图说等内容。
整体而言,FlexRay一开始便以2.0版本问世,其后的2.1、2.1 Rev A都只是小幅修订,三个版本之间并无太大差异,不过细究来看2.1 Rev A确实是目前最新也最为稳定成熟的版本,因此半导体业者不约而同地在2.1 Rev A标准发表后,才正式推出对应支援的控制晶片及收发器晶片。
版本应用概况
2005年底当各半导体业者几乎与2.1 Rev A标准同步发表支援晶片后,经过了一年的时间终于有实际商用车款采用FlexRay作为车用介面,亦即德国BMW的新款X5 SAV(Sports Activity Vehicle)系列车种,主要使用Freescale及NXP的FlexRay晶片。 2006年底率先于北美市场销售,全球其他市场则在2007年春正式销售。不过BMW X5也仅是作小幅且保守性的运用,只在底盘悬吊的气体阻尼系统(pneumatic damping system)部分使用FlexRay介面,运用该介面进行电子式的阻尼控制,进而实现自适性驾驶(Adaptive Drive)的新特点,除此之外全车其余各处仍使用其他的车用介面。
| 《图三 德国BMW于2006年底发表的新车X5,其底盘悬吊系统位置已实行FlexRay接口,透过电子控制方式来控制阻尼,使驾驶能更平顺操控全车。 》 | 数据源:FlexRay.com |
|
在支援晶片方面,最先推出支援FlexRay的半导体业者如美国的Freescale与NXP,这两家业者也是最早加入FlexRay Consortium的晶片业者,此后其他业者也随之跟进,包括德国的Infineon、日本的Fujitsu 、Renesas、NEC等等。
FlexRay介面的特性
FlexRay介面与以往的车用电子介面有何不同?或者应该这么问才更为清楚:现有的车用电子介面有何不足之处,因此需要另外设计FlexRay介面?上述疑问便可从FlexRay的特性中来了解。
双通道高速传输
FlexRay首先强调的便是传输速率。 FlexRay每一条通道(Channel)的传输率为10Mbps,而每个FlexRay节点(Node)可连接一条通道,可连接两条通道,但不能连结三条通道。且连接两条通道时,可以将第二条通道视为第一条通道的备援(Redundant;亦称冗余)通道,但也可不作为备援通道而当成视为一般运行通道。如果两条通道都为一般运行通道,则传输速率则为单一通道的2倍,因此可达20Mbps。
电压与传输介质的限制
若从PC或CE领域的角度来看,20Mbps的传输速度是相当慢的汇流排介面,然而车用介面强调的是强韧的抗环境能力,所以逻辑准位电压都较高,一般位于14V~ 42V,而非PC、CE领域所使用的3.3V或是2.5V,因此在较高电压准位的环境下,仍有20Mbps的传输速度实属不易。
此外,若以光纤传输介质为基础,当然会有较高的传输速度,像是MOST即指定使用光纤为其传输介质,因此拥有23MBaud(鲍率)的传输速率,但目前FlexRay还是以铜线( Metal)为主,在传输速率上自然会受到限制。不过FlexRay也允许使用塑胶光纤(Plastic Of Fiber;POF)作为选择性的传输介质方案。塑胶材质的光纤优点在于比玻璃、石英材质的光纤价格更为低廉,且具有比金属线路更佳的抗环境能力。
同步时基性与时间触发
再者FlexRay具有同步时基性的传输特性,以FlexRay介面连接的各节点,都依据相同的时序来运作,且每隔一段周期时间,就会自行确认时序的偏差性,自动对偏差进行修正。这项的传输特性,可将时序偏差限制于一定限度内,使时序的精确度介于0.5微秒(uS)~10uS之间,而一般多为1uS~2uS之间。高精确的时脉传输特性,再搭配时间性触发(Time-Triggered)、分时多方存取(Time Division Multiple Access;TDMA)的协定作法,可规定FlexRay的传输延迟时间限制在50uS之内。
备援性
另外即是上述曾约略提过的备援性。除了运用第二通道作为备援传输外,FlexRay也允许在同一通道内重复发送相同内容讯息,重复发送可增强资料收发的可靠性,不过缺点是增加传输频宽的耗用与负担,所以这样的方式在FlexRay标准中被视为选用方案,只在传递重要的讯息时才使用。
弹性的网路拓墣
最后是弹性化的连接拓朴(Topology)。 FlexRay可以传统常见的汇流排(Bus)方式来连接各节点,也可用星状(Star)的放射性方式来连接各节点,或者同时使用两种连接方式(Mixed),其中汇流排方式属被动式,星状方式则有被动式与主动式两种。
| 《图四 FlexRay的特点之一是灵活弹性的连接拓朴,图中为4种FlexRay允许的连接拓朴:被动式总线型、被动星型、主动串接星型、以及主动星型为主并以被动总线型为辅的混合型。 》 | 数据源:www.evaluationengineering.com |
|
FlexRay将取代CAN
上述FlexRay具有的技术特点,即是为了取代现有的CAN车用汇流排。
从1980年代开始使用的CAN介面,用于车体系统中的各种控制层面,然而近年来由于车用电子式控制已经越来越复杂,CAN介面逐渐无法胜任,因此产业界才会提出新式FlexRay车用汇流排标准,取代相形之下已经沉重吃力的CAN介面技术。
传输速率过低
首先在速率方面,CAN仅有1Mbps,已难以因应传递多变快速讯息的车用环境,相对地FlexRay拥有10Mbps,使用双通道则可至20Mbps,是CAN的10倍至20倍速率。现有的诸多车款应用中,单一的CAN介面已不敷使用,经常要使用2组以上的CAN介面。
过于僵化的事件触发模式
其次CAN采事件性触发(Event-Triggered),在一些具急迫性的车用控制上并不适用。虽然CAN也延伸发展时间性触发的传输方式,但其延伸支援的效益有限。相对地FlexRay采原生的时间性触发传输,并以此为基础运用动态时间段可兼顾事件性传输,加上FlexRay采取更为严谨的时脉同步机制,因此能因应更严苛、更快速反应的控制讯息传递。
不适合急迫性的感测方式
更重要的是,FlexRay采行分时方式进行多方存取,将时间切分成时槽(Slot)方式来运用。相对地CAN的多方存取采行载波感测的碰撞方式(Carrier Sense Multiple Access;CSMA),这种碰撞方式的问题在于,会使想要收发的各节点,必须尝试争抢汇流排的使用权。倘若无法取得使用权就必须持续尝试,因此无从保证讯息能在一定的时间内可被送出,这也是CAN不适合急迫性即时控制的一项主因。
节点数少
另外FlexRay可连接的节点数也多过CAN,1组CAN最多可连接16个节点,且速率必须从1Mbps降至500kbps,相对地FlexRay若采行Bus汇流排型态,最多可连接22个节点,而星状型态或混合型态更可达64个节点。
例外之处
FlexRay在各项表现上几乎都超越以往的CAN,但也有些例外之处。例如在协定传送的ID方面,CAN可使用11-bit长度,也可使用29-bit(位元)长度,然现阶段的FlexRay仅能使用11-bit。此外CAN可在线路长度与传输速率上异中求同,在1Mbps速率时最长可达有40公尺,若速率降至125kbps则可延伸长度至500公尺。相对地FlexRay若以主动式星状连接,则2个主动星状节点间最长连线距离只有22公尺。
与其他介面标准共存共荣
不过FlexRay并不会用来取代其他例如LIN或MOST车用电子介面,其他既定介面标准各司其职,像是LIN介面无须重视传输速度、也不需重视精确的工作时序,而是诉求低成本的简单控制,如电动车窗、车门锁等应用,与CAN或FlexRay的车身主体操控性的应用层面大不相同。
| 《图五 低速LIN、中速CAN以及高速FlexRay都属于车用的控制传输接口,MOST则属于车用的资通讯(Telematics)媒体信息传输接口。 》 | 数据源:FlexRay.com |
|
同样地FlexRay也不会取代MOST或IDB-1394等。 MOST或IDB-1394主要是用来传递车用影音视讯多媒体资料,例如倒车入库时的车尾影像,或是车内娱乐通讯系统的画面传输如电子地图、车内娱乐影片播放、电视游乐器画面等等。多媒体资料的传输量比车体控制性的传输量还要大,不是FlexRay所能负荷,因此FlexRay不可能取而代之。
逐步而渐进地取代CAN介面
虽然FlexRay的目标是取代CAN,且几乎所有的新特性设计都是针对CAN而来,然而现阶段推行FlexRay的业者,也不敢大张旗鼓地表示立即采用FlexRay取代CAN,而是以低调暗示的方式来推展,这个现象很有趣,其原因如下。
CAN技术持续革新中
CAN介面的强化提升规划仍在持续中,例如以时间触发的CAN介面(Time Triggered CAN;TT-CAN)可提升传输速度,如此将会拉近CAN与FlexRay之间的技术差距。
市场已经普及应用
CAN介面技术已发展10多年以上,市场已经普及应用,支援CAN介面的收发器和控制器晶片等,其价格相当低廉,短时间内支援FlexRay介面的收发器和控制器晶片,无法达到相同低廉的水准。
取代条件仍有待加强
FlexRay必须在复杂性的车用电子控制上才能发挥特长,反之在简单架构的车用电子控制上,使用CAN与使用FlexRay的差异条件并不大,甚至在1组CAN介面无法因应设计时,只要再增设若干组同样可以解决。 FlexRay必须在增设多组CAN介面都无法因应、或因此CAN成本高过FlexRay时,才有机会被应用,FlexRay的不可替代性仍有待加强。
设计FlexRay的应用独特性
基于上述原因,FlexRay将渐进地取代CAN,一方面支援FlexRay介面的晶片,在价位上会逐步与支援CAN晶片价格拉近,另一方面汽车越来越复杂的电子控制设计趋势不可避免,这也会有利于FlexRay。
即便FlexRay不诉求取代CAN,也依然有其运用价值,例如将FlexRay做为车体中多条CAN介面的汇流骨干,亦即采用FlexRay和CAN并存并用的架构,如此可简化骨干控制网路的线路设计。现在整部汽车也不可能全部采用CAN介面,在简易的末稍控制上会应用成本更为低廉的LIN介面,且多个LIN介面也会往上汇流到CAN介面中。
而且,FlexRay之所以设计成能以汇流排以及星状方式连接,其实就是为了让原有使用CAN采行汇流排方式连接设计手法的工程师快速习惯,所以FlexRay相容具备两种连接方式。不过真正能发挥FlexRay优势的连接方式还是主动式星状连接以及双通道连接模式,单通道与汇流排方式都是为了相容与低成本导向所提出的权宜之计。
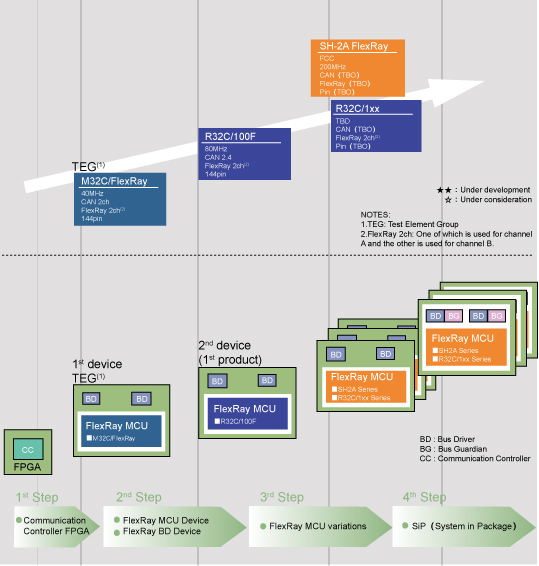
| 《图六 Renesas对FlexRay技术的支持展望图(Roadmap),最初先以FPGA来试制FlexRay的通讯控制器,之后推出FlexRay的控制器、接口驱动器(或称接口收发器)、第三步则推出不同型款的FlexRay控制器,第四步则会加入Renesas最擅长的SiP整合技术。 》 | 数据源:Renesas.com |
|
不仅FlexRay介面必须尽可能相容于CAN,就连现阶段业者推出的FlexRay晶片,也有类似的相容设计。多数的FlexRay控制器晶片除了内建FlexRay介面外,也都内建多组CAN介面及LIN介面,为了就是要让工程师在设计应用时能更方便地将FlexRay与其他车用介面连接,使FlexRay成为各类车用介面的骨干,或做为转接的角色,以此推广FlexRay的应用。
FlexRay的明亮未来
未来FlexRay确实具有不错的前景,因为会有越来越多来的车用控制是从传统机械式控制转变成为电子式控制。例如过去是机械式的方向盘,如今则为动力方向盘,机械式方向盘以油压或机械连杆方式来操控方向,高速行车时方向盘的转向压力也会增加。相对地,动力方向盘由马达或其他动力来操控方式,车内驾驶只是将方向盘的转动角度转换成电子信号,再以此信号通知马达转变方向,如此操控将不受速度压力所影响。
动力方向盘此种透过电子线路来操控的作法,亦即一般所称为的线控(X-by-Wire)。未来汽车将会有越来越多的操控方式改以线控实现,例如线控驾驶(Drive-by-Wire)、线控煞车(Brake-by-Wire)等等。再加上未来复合动力的汽车也将越来越普及,一部汽车可能使用汽油为动力,也可能使用天然气瓦斯为动力,也可能以电瓶、氢气、乙醇为动力,届时车用电子控制必然更加复杂。凡此种种大环境的变迁趋势,都是未来FlexRay介面被看好的主因。

